SensorExplorer 是 Microsoft市 集上可用的應用程式,而且應用程式套件可透過 GitHub 存取。 SensorExplorer 提供測試,以快速驗證支援感測器的安裝,例如方向感測器(加速計、簡單方向感測器等),並提供詳細的數據表和繪圖,以啟用監視不同的感測器。 SensorExplorer 也提供可檢閱以進行偵錯的記錄。
有五種模式可透過 SensorExplorer 左側的功能表列使用:
測試: 用於手動測試支援的感測器。 方向測試會確認方向感測器已安裝在正確的位置,且感測器數據如預期般。 您也可以使用其他測試,例如頻率、位移和抖動。 感測器數據是使用 UWP感測器 API 來讀取。
視圖: 用於檢視感測器數據和屬性。 在此模式中,應用程式會顯示來自各種感測器的數據視覺效果,例如加速計、指南針、陀螺儀、傾角計、光感測器和方向感測器,並以表格式顯示詳細的感測器資訊。 此模式會監視感測器的任何異常行為,也可用來設定感測器的報告間隔。
MALT:用於連接和控制MALT(Microsoft Ambient Light Tool),這是一種簡單的低成本光線測試設備。 此工具結合了微控制器、光感測器和可控制的光源面板,以校正光線感測器,並以視覺方式測量面板的光線曲線。
顯示增強覆寫: 用於覆寫顯示設定。 在此模式中,滑桿和情境按鈕可以用於以各種方式設定顯示亮度。 若要覆寫指定的顯示,請選取 [覆寫要求] 滑桿。
距離: 用於手動和自動測試支持的人類存在感測器。 為了判斷人類存在感測器的精確度,手動測試會使用預先定義的距離。 自動測試會使用感測器、具有臉部偵測功能的前置相機,以及邊界框。
公用事業
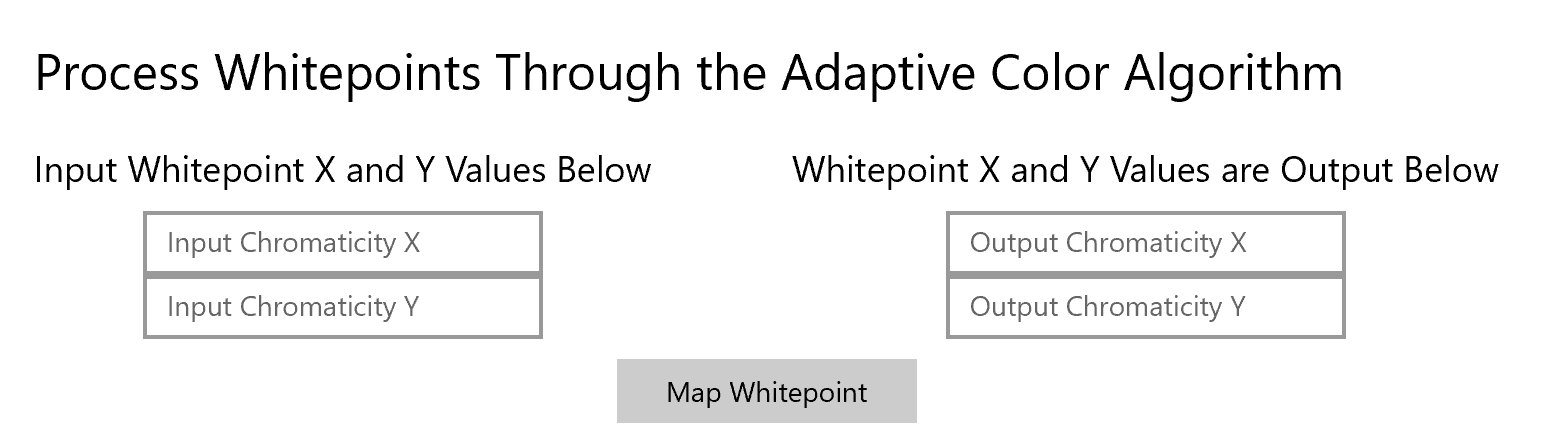
如果您在檢視窗格中選取淺色感測器,則會公開白點計算公用程式。 藉由選取 [手動計算白點],此公用程式允許透過Microsoft的調適型色彩演演算法執行 X 和 Y 色度。 輸入應該是環境光線,輸出是 Windows 的對應值。
如何使用 SensorExplorer 測試感測器
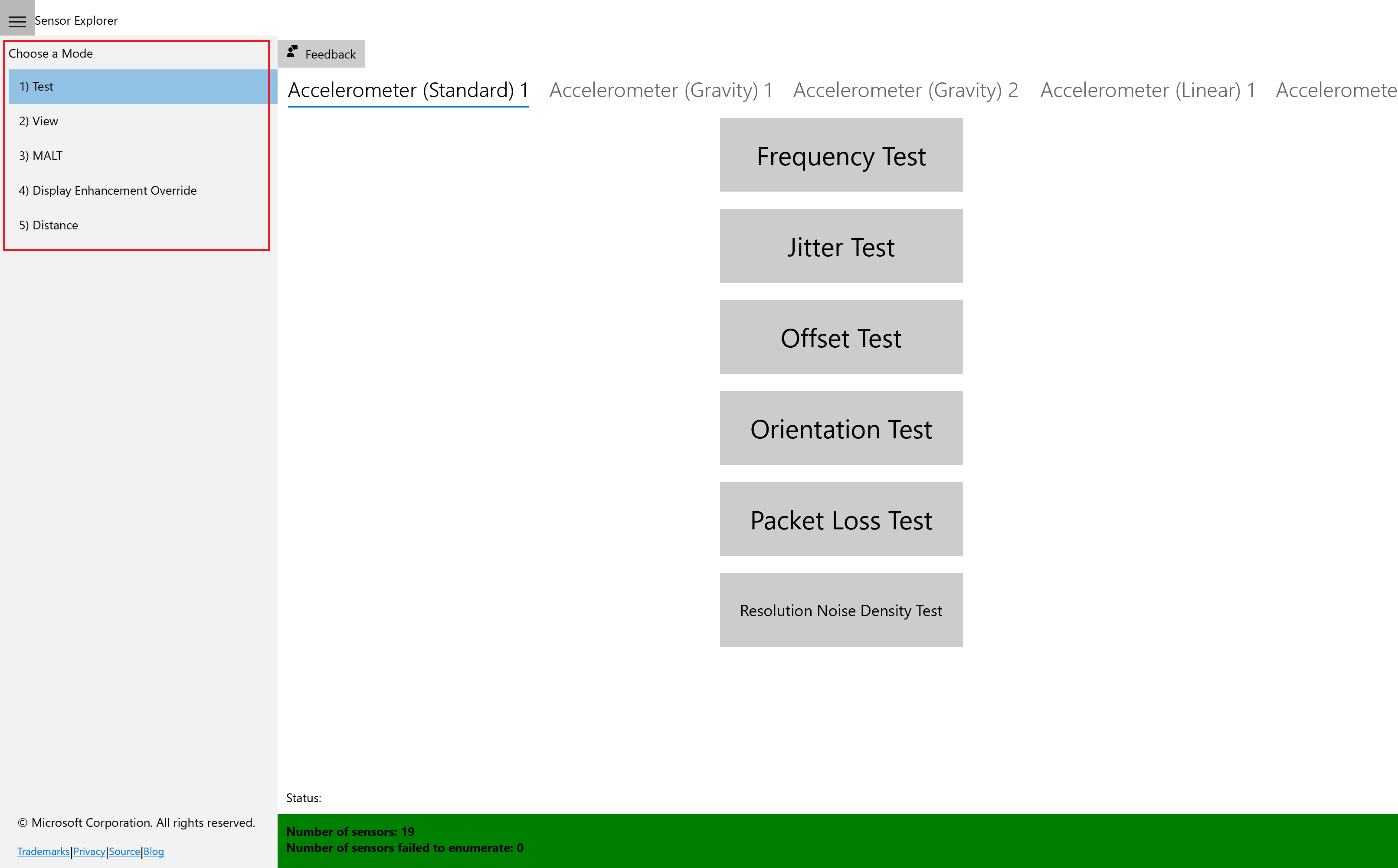
您可以捲動上方選單列來探索每個感測器可用的測試,此螢幕快照中醒目提示為紅色方塊:
SensorExplorer 方向測試
這項測試會要求您以不同的方向設定裝置,然後據以檢查感測器讀數。 測試結束時會顯示通過或失敗的結果。
開始方向測試之前
在測試模式下,如果裝置旋轉時螢幕顯示隨之旋轉,請關閉裝置上的自動旋轉功能。 在 [設定 ] 中搜尋「旋轉鎖定」,然後開啟它。 否則,自動旋轉無需關閉。 如需方向和參考框架的詳細資訊,請參閱 裝置參考框架。
開始測試
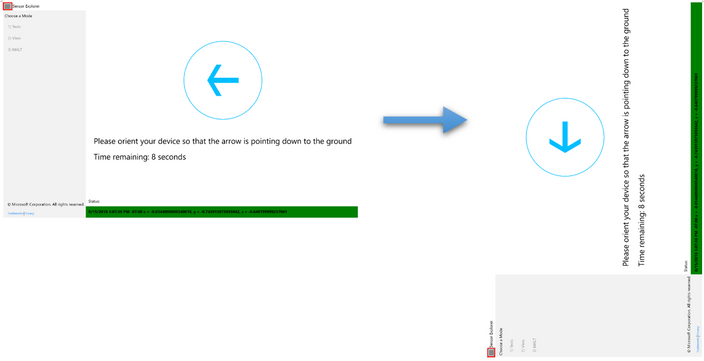
選取 [ 開始] 按鈕以開始測試。 針對每個測試,您有10秒的時間將裝置導向,讓螢幕上的箭號指向地面。
- 您可以選取圖示(在螢幕快照中醒目提示為紅色方塊),以在測試期間隱藏功能表欄。
- 測試期間會停用功能表欄。 測試完成時會重新啟用。
- 針對簡單方向感測器,測試的四個方向是面對面、直下、左和右。 針對所有其他感測器,測試的四個方向是向上、向下、左右。
一旦感測器資料顯示您的裝置確實處於預期的方向,就會顯示綠色複選標記。 然後,您會自動移至下一個測試。
否則,會在 10 秒之後顯示紅色 『X』,表示這一輪測試失敗。
測試之後
選取 [ 儲存記錄] 按鈕以儲存記錄檔。 儲存所有回合測試的數據。 選取 [ 重新啟動] 按鈕以啟動另一個測試。
頻率測試
計算接收的感測器讀數數目/60 秒。 數值會顯示在測試結束時。
位移測試
計算感測器讀數與預期值相比較的平均誤差。 數值會顯示在測試結束時。
抖動測試
計算與初始讀取相比,在一段時間內感測器讀數的最大差異。 數值會顯示在測試結束時。
解析度雜訊密度測試
此測試會檢查裝置中實體加速計感測器的實際感測器解析度和雜訊。 數值會顯示在測試結束時。
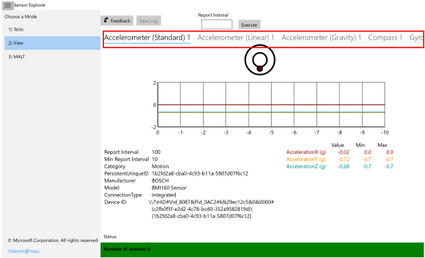
如何監視感測器
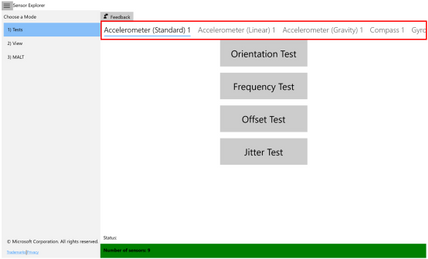
檢視模式會自動偵測任何連接至或內嵌在平臺中的感測器,並顯示從感測器讀取的資訊。 若要變更顯示的感測器,請捲動頂端功能表欄(在螢幕快照中醒目提示為紅色方塊)。 針對每個感測器,目前的數據和屬性會顯示在數據表中,並繪製為移動的超聲波。 您可以在這裡變更特定感測器的報表間隔。
記錄的其他資訊
[ 儲存記錄檔 ] 按鈕會提示事件追蹤記錄檔的名稱和位置,且名稱為 SensorExplorerLog。 若要檢視 ETL 檔案,請使用 tracerpt 命令。
![SensorExplorer 記錄 [另存新檔] 對話框的螢幕快照。](images/sensor-explorer-log.png)
會記錄下列資料:
所選感測器的屬性
每個測試的相關信息
用於方向測試:
- 測試通過時的感測器讀數
- 當測試失敗時,倒數計時前的最後一個感測器讀取結束
針對其他測試:
- 測試期間收集的所有感測器讀數
- 最終結果