Remarque
L’accès à cette page nécessite une autorisation. Vous pouvez essayer de vous connecter ou de modifier des répertoires.
L’accès à cette page nécessite une autorisation. Vous pouvez essayer de modifier des répertoires.
Le mappage spatial fournit une représentation détaillée des surfaces réelles dans l’environnement autour de l’HoloLens, ce qui permet aux développeurs de créer une expérience de réalité mixte convaincante. En fusionnant le monde réel avec le monde virtuel, une application peut rendre les hologrammes réels. Les applications peuvent également s’aligner plus naturellement sur les attentes des utilisateurs en fournissant des comportements et des interactions réels familiers.
Prise en charge de l’appareil
| Fonctionnalité | HoloLens (1ère génération) | HoloLens 2 | Casques immersifs |
| Mappage spatial | ✔️ | ✔️ | ❌ |
Pourquoi le mappage spatial est-il important ?
Le mappage spatial permet de placer des objets sur des surfaces réelles. Cela permet d’ancrer des objets dans le monde de l’utilisateur et de tirer parti des signaux de profondeur du monde réel. Le fait d’obluder vos hologrammes en fonction d’autres hologrammes et d’objets réels permet de convaincre l’utilisateur que ces hologrammes se trouvent réellement dans leur espace. Les hologrammes flottant dans l’espace ou se déplaçant avec l’utilisateur ne sont pas aussi réels. Lorsque cela est possible, placez les articles pour plus de confort.
Visualiser des surfaces lors du placement ou du déplacement d’hologrammes (utilisez une grille projetée). Cela permet aux utilisateurs de savoir où placer le mieux leurs hologrammes et indique si l’emplacement où ils tentent de placer l’hologramme n’est pas mappé. Vous pouvez « afficher des éléments » vers l’utilisateur s’ils finissent par trop d’angle.
Présentation conceptuelle
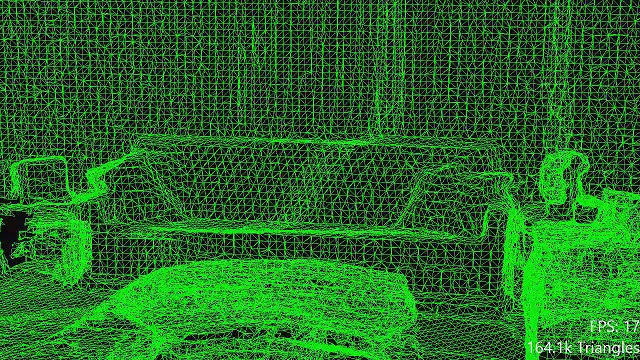
Exemple de maillage de mappage spatial couvrant une pièce
Les deux principaux types d’objets utilisés pour le mappage spatial sont « Spatial Surface Observer » et « Spatial Surface ».
L’application fournit à Spatial Surface Observer un ou plusieurs volumes englobants pour définir les régions d’espace dans lesquelles l’application souhaite recevoir des données de mappage spatial. Pour chacun de ces volumes, le mappage spatial fournit à l’application un ensemble de surfaces spatiales.
Ces volumes peuvent être stationnaires (dans un emplacement fixe basé sur le monde réel) ou être attachés à l’HoloLens (ils se déplacent, mais ne pivotent pas, avec l’HoloLens à mesure qu’il se déplace dans l’environnement). Chaque surface spatiale décrit des surfaces réelles dans un petit volume d’espace, représentées sous la forme d’un maillage de triangle attaché à un système de coordonnées spatiales verrouillée dans le monde.
À mesure que l’HoloLens collecte de nouvelles données sur l’environnement et que des modifications de l’environnement se produisent, des surfaces spatiales apparaissent, disparaissent et changent.
Démonstration des concepts de conception de la reconnaissance spatiale
Si vous souhaitez voir les concepts de conception de la reconnaissance spatiale en action, case activée notre démonstration vidéo Conception d’hologrammes - Reconnaissance spatiale ci-dessous. Une fois que vous avez terminé, poursuivez pour obtenir une présentation plus détaillée de sujets spécifiques.
Cette vidéo a été tirée de l’application « Conception d’hologrammes » HoloLens 2. Téléchargez et profitez de l’expérience complète ici.
Mappage spatial et Compréhension des scènes WorldMesh
Par HoloLens 2, il est possible d’interroger une version statique des données de mappage spatial à l’aide du Kit de développement logiciel (SDK) Scene Understanding (paramètre EnableWorldMesh). Voici les différences entre deux façons d’accéder aux données de mappage spatial :
- API de mappage spatial :
- Plage limitée : données de mappage spatial disponibles pour les applications dans une « bulle » mise en cache de taille limitée autour de l’utilisateur.
- Fournit des mises à jour à faible latence des régions de maillage modifiées par le biais d’événements SurfacesChanged.
- Niveau de détails variable contrôlé par le paramètre Triangles par mètre cube.
- Kit de développement logiciel (SDK) De compréhension des scènes :
- Plage illimitée : fournit toutes les données de mappage spatial analysées dans le rayon de requête.
- Fournit une instantané statique des données de mappage spatial. L’obtention des données de mappage spatial mises à jour nécessite l’exécution d’une nouvelle requête pour l’ensemble du maillage.
- Niveau de détails cohérent contrôlé par le paramètre RequestedMeshLevelOfDetail.
Qu’est-ce qui influence la qualité de la cartographie spatiale ?
Plusieurs facteurs, détaillés ici, peuvent affecter la fréquence et la gravité de ces erreurs. Toutefois, vous devez concevoir votre application afin que l’utilisateur puisse atteindre ses objectifs, même en présence d’erreurs dans les données de mappage spatial.
Scénarios d’utilisation courants
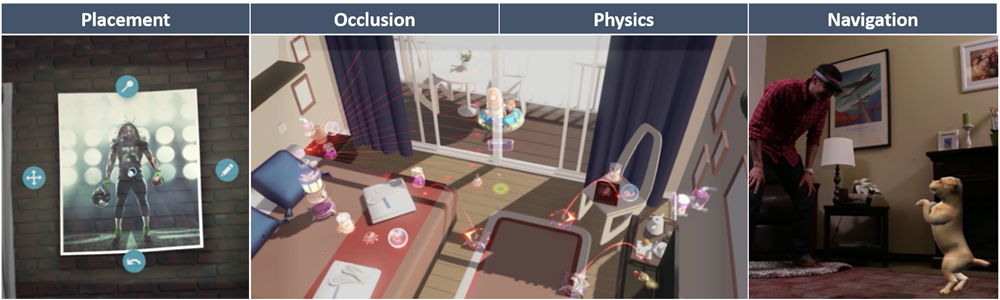
Placement
Le mappage spatial offre aux applications la possibilité de présenter des formes d’interaction naturelles et familières à l’utilisateur ; quoi de plus naturel que de poser votre téléphone sur le bureau ?
Le fait de limiter le placement des hologrammes (ou, plus généralement, toute sélection d’emplacements spatiaux) sur les surfaces fournit une cartographie naturelle de la 3D (point dans l’espace) à 2D (point sur surface). Cela réduit la quantité d’informations que l’utilisateur doit fournir à l’application et rend les interactions de l’utilisateur plus rapides, plus faciles et plus précises. Cela est vrai parce que « distance loin » n’est pas quelque chose que nous sommes habitués à communiquer physiquement avec d’autres personnes ou avec des ordinateurs. Lorsque nous pointons avec notre doigt, nous spécifions une direction, mais pas une distance.
Une mise en garde importante ici est que lorsqu’une application déduit la distance par rapport à la direction (par exemple en effectuant un raycast le long de la direction du regard de l’utilisateur pour trouver la surface spatiale la plus proche), cela doit produire des résultats que l’utilisateur peut prédire de manière fiable. Sinon, l’utilisateur perd son sens du contrôle, ce qui peut rapidement devenir frustrant. Une méthode qui vous aide à cela consiste à effectuer plusieurs raycasts au lieu d’une seule. Les résultats agrégés doivent être plus lisses et plus prévisibles, moins sensibles à l’influence des résultats « aberrants » temporaires (comme peuvent être causés par des rayons qui passent à travers de petits trous ou atteignent de petits morceaux de géométrie dont l’utilisateur n’est pas conscient). L’agrégation ou le lissage peut également être effectué au fil du temps ; par exemple, vous pouvez limiter la vitesse maximale à laquelle un hologramme peut varier en distance par rapport à l’utilisateur. Le simple fait de limiter la valeur de distance minimale et maximale peut également être utile, de sorte que l’hologramme déplacé ne s’envole pas soudainement dans la distance ou ne se bloque pas sur le visage de l’utilisateur.
Les applications peuvent également utiliser la forme et la direction des surfaces pour guider le positionnement des hologrammes. Une chaise holographique ne doit pas pénétrer à travers les murs et doit s’asseoir au ras du sol, même si elle est légèrement inégale. Ce type de fonctionnalité reposerait probablement sur l’utilisation de collisions physiques plutôt que de raycasts, mais des préoccupations similaires s’appliqueront. Si l’hologramme placé comporte de nombreux petits polygones qui sortent, comme les jambes d’une chaise, il peut être judicieux d’étendre la représentation physique de ces polygones à quelque chose de plus large et plus lisse afin qu’ils soient plus capables de glisser sur les surfaces spatiales sans s’accrocher.
À l’extrême, l’entrée utilisateur peut être entièrement simplifiée et les surfaces spatiales peuvent être utilisées pour effectuer un positionnement entièrement automatique des hologrammes. Par exemple, l’application peut placer un commutateur de lumière holographique quelque part sur le mur pour que l’utilisateur puisse appuyer. La même mise en garde sur la prévisibilité s’applique doublement ici ; si l’utilisateur s’attend à contrôler le positionnement des hologrammes, mais que l’application ne place pas toujours les hologrammes là où il s’attend (si le commutateur lumineux apparaît quelque part que l’utilisateur ne peut pas atteindre), cela sera une expérience frustrante. Il peut en fait être pire d’effectuer un placement automatique qui nécessite une correction de l’utilisateur un certain temps, que d’exiger simplement de l’utilisateur qu’il effectue toujours le placement lui-même ; parce que le placement automatique réussi est attendu, la correction manuelle semble être un fardeau !
Notez également que la capacité d’une application à utiliser des surfaces spatiales pour le placement dépend fortement de l’expérience d’analyse de l’application. Si une surface n’a pas été analysée, elle ne peut pas être utilisée pour le placement. C’est à l’application de le faire comprendre à l’utilisateur, afin qu’il puisse soit aider à analyser de nouvelles surfaces, soit à sélectionner un nouvel emplacement.
Les commentaires visuels à l’utilisateur sont d’une importance capitale pendant le placement. L’utilisateur doit savoir où l’hologramme est basé sur la surface la plus proche avec des effets de mise à la terre. Ils doivent comprendre pourquoi le mouvement de leur hologramme est limité (par exemple, en raison de collisions avec une autre surface proche). S’ils ne peuvent pas placer un hologramme à l’emplacement actuel, les commentaires visuels doivent indiquer clairement pourquoi. Par exemple, si l’utilisateur tente de placer un canapé holographique coincé à mi-chemin dans le mur, les parties du canapé qui se trouvent derrière le mur doivent pulser dans une couleur de colère. Ou inversement, si l’application ne peut pas trouver une surface spatiale dans un emplacement où l’utilisateur peut voir une surface réelle, l’application doit le clarifier. L’absence évidente d’effet de mise à la terre dans ce domaine pourrait atteindre cet objectif.
Occlusion
L’une des principales utilisations des surfaces de mappage spatial est simplement d’obstruer les hologrammes. Ce comportement simple a un impact énorme sur le réalisme perçu des hologrammes, aidant à créer un sens viscéral qui habite vraiment le même espace physique que l’utilisateur.
L’occlusion fournit également des informations à l’utilisateur ; lorsqu’un hologramme semble être obstrué par une surface réelle, cela fournit un retour visuel supplémentaire quant à l’emplacement spatial de cet hologramme dans le monde. À l’inverse, l’occlusion peut également masquer utilement des informations à l’utilisateur ; Le fait d’obluder des hologrammes derrière des murs peut réduire l’encombrement visuel de manière intuitive. Pour masquer ou révéler un hologramme, l’utilisateur doit simplement déplacer sa tête.
L’occlusion peut également être utilisée pour répondre aux attentes d’une interface utilisateur naturelle basée sur des interactions physiques familières ; si un hologramme est obstrué par une surface, c’est parce que cette surface est pleine. L’utilisateur doit donc s’attendre à ce que l’hologramme entre en collision avec cette surface et ne la traverse pas.
Parfois, l’occlusion des hologrammes n’est pas souhaitable. Si un utilisateur doit interagir avec un hologramme, il doit le voir, même s’il se trouve derrière une surface réelle. Dans ce cas, il est généralement judicieux de rendre un tel hologramme différemment lorsqu’il est obstrué (par exemple, en réduisant sa luminosité). De cette façon, l’utilisateur peut localiser visuellement l’hologramme, mais il sait qu’il se trouve derrière quelque chose.
Physique
L’utilisation de la simulation physique est une autre façon d’utiliser le mappage spatial pour renforcer la présence d’hologrammes dans l’espace physique de l’utilisateur. Quand ma boule holographique en caoutchouc roule de façon réaliste hors de mon bureau, rebondit sur le sol et disparaît sous le canapé, il peut être difficile pour moi de croire qu’elle n’est pas là.
La simulation physique offre également la possibilité pour une application d’utiliser des interactions naturelles et familières basées sur la physique. Déplacer un morceau de meubles holographiques sur le sol sera probablement plus facile pour l’utilisateur si le mobilier répond comme s’il coulait sur le plancher avec l’inertie et la friction appropriées.
Pour générer des comportements physiques réalistes, vous devrez probablement effectuer un traitement de maillage tel que le remplissage des trous, l’élimination des hallucinations flottantes et le lissage des surfaces rugueuses.
Vous devez également prendre en compte la façon dont l’expérience d’analyse de votre application influence sa simulation physique. Tout d’abord, les surfaces manquantes n’entreront pas en collision avec quoi que ce soit ; que se passe-t-il quand la boule de caoutchouc se déroule dans le couloir et hors du monde connu ? Ensuite, vous devez décider si vous continuerez à répondre aux modifications de l’environnement au fil du temps. Dans certains cas, vous souhaiterez répondre le plus rapidement possible. dire si l’utilisateur utilise des portes et des meubles comme barricades mobiles en défense contre une tempête de flèches romaines entrantes. Toutefois, dans d’autres cas, vous pouvez ignorer les nouvelles mises à jour . conduire votre voiture de sport holographique autour de l’hippodrome sur votre sol peut soudainement ne pas être si amusant si votre chien décide de s’asseoir au milieu de la piste.
Navigation
Les applications peuvent utiliser des données de mappage spatial pour accorder aux caractères holographiques (ou agents) la possibilité de naviguer dans le monde réel de la même façon qu’une personne réelle. Cela peut aider à renforcer la présence de caractères holographiques en les limitant au même ensemble de comportements naturels et familiers que ceux de l’utilisateur et de ses amis.
Les fonctionnalités de navigation peuvent également être utiles aux utilisateurs. Une fois qu’une carte de navigation a été créée dans une zone donnée, elle peut être partagée pour fournir des directions holographiques aux nouveaux utilisateurs qui ne connaissent pas cet emplacement. Cette carte pourrait être conçue pour aider à maintenir la circulation des piétons en douceur, ou pour éviter les accidents dans des endroits dangereux comme les chantiers de construction.
Les principaux défis techniques impliqués dans l’implémentation de la fonctionnalité de navigation seront la détection fiable des surfaces accessibles à pied (les humains ne marchent pas sur les tables !) et l’adaptation gracieuse aux changements dans l’environnement (les humains ne franchissent pas les portes fermées !). Le maillage peut nécessiter un traitement avant d’être utilisable pour la planification du chemin et la navigation par un caractère virtuel. Le lissage du maillage et l’élimination des hallucinations peuvent aider à éviter que les caractères ne deviennent bloqués. Vous pouvez également simplifier considérablement le maillage pour accélérer la planification du chemin et les calculs de navigation de votre personnage. Ces défis ont reçu beaucoup d’attention dans le développement de la technologie des jeux vidéo, et il existe une multitude de documents de recherche disponibles sur ces sujets.
La fonctionnalité NavMesh intégrée dans Unity ne peut pas être utilisée par défaut pour les surfaces de mappage spatial, car les surfaces ne sont pas connues avant le démarrage de l’application. Toutefois, vous pouvez générer un NavMesh pendant l’exécution en installant NavMeshComponents. Notez que le système de mappage spatial ne fournit pas d’informations sur les surfaces éloignées de l’emplacement actuel de l’utilisateur . pour créer une carte d’une grande surface, l’application doit « mémoriser » les surfaces. Vous pouvez également augmenter le paramètre d’étendues d’observation dans le profil de reconnaissance spatiale, ce qui augmente la zone sur laquelle vous pouvez créer votre NavMesh.
Visualisation
La plupart du temps, il convient que les surfaces spatiales soient invisibles ; pour réduire l’encombrement visuel et laisser le monde réel parler de lui-même. Toutefois, il est parfois utile de visualiser directement les surfaces de mappage spatial, même si leurs équivalents réels sont visibles.
Par exemple, lorsque l’utilisateur tente de placer un hologramme sur une surface (en plaçant une armoire holographique sur le mur, par exemple), il peut être utile de « broyer » l’hologramme en projetant une ombre sur la surface. Cela donne à l’utilisateur une idée beaucoup plus claire de la proximité physique exacte entre l’hologramme et la surface. Il s’agit également d’un exemple de la pratique plus générale qui consiste à « prévisualiser » visuellement une modification avant que l’utilisateur ne s’y engage.
En visualisant les surfaces, l’application peut partager avec l’utilisateur sa compréhension de l’environnement. Par exemple, un jeu de plateau holographique peut visualiser les surfaces horizontales qu’il a identifiées en tant que « tables », afin que l’utilisateur sache où il doit interagir.
La visualisation des surfaces peut être un moyen utile de montrer à l’utilisateur les espaces à proximité qui sont masqués. Cela pourrait permettre à l’utilisateur d’accéder à sa cuisine (et à tous ses hologrammes contenus) à partir de son salon.
Les maillages de surface fournis par le mappage spatial peuvent ne pas être particulièrement « propre ». Il est important de les visualiser de manière appropriée. Les calculs d’éclairage traditionnels peuvent mettre en évidence des erreurs dans les normales de surface d’une manière visuellement gênante, tandis que les textures « propre » projetées sur la surface peuvent aider à lui donner un aspect plus tidieur. Il est également possible d’effectuer un traitement de maillage pour améliorer les propriétés de maillage, avant que les surfaces ne soient rendues.
Remarque
HoloLens 2 implémente un nouveau runtime Scene Understanding, qui fournit aux développeurs Mixed Reality une représentation d’environnement structurée et de haut niveau conçue pour simplifier l’implémentation du placement, de l’occlusion, de la physique et de la navigation.
Utilisation du Surface Observer
Le point de départ du mappage spatial est l’observateur de surface. Le flux de programme se présente comme suit :
- Créer un objet d’observateur de surface
- Fournissez un ou plusieurs volumes spatiaux pour définir les régions d’intérêt dans lesquelles l’application souhaite recevoir des données de mappage spatial. Un volume spatial est simplement une forme qui définit une zone d’espace, telle qu’une sphère ou une boîte.
- Utilisez un volume spatial avec un système de coordonnées spatiales verrouillé pour identifier une région fixe du monde physique.
- Utilisez un volume spatial, mis à jour chaque image avec un système de coordonnées spatiales verrouillée par le corps, pour identifier une région d’espace qui se déplace (mais ne pivote pas) avec l’utilisateur.
- Ces volumes spatiaux peuvent être modifiés ultérieurement à tout moment, à mesure que le status de l’application ou de l’utilisateur change.
- Utiliser l’interrogation ou la notification pour récupérer des informations sur les surfaces spatiales
- Vous pouvez « interroger » l’observateur de surface pour rechercher des status de surface spatiale à tout moment. Au lieu de cela, vous pouvez vous inscrire à l’événement « surfaces modifiées » de l’observateur de surface, qui informera l’application lorsque les surfaces spatiales ont changé.
- Pour un volume spatial dynamique, tel que le frustum de vue ou un volume verrouillé par le corps, les applications doivent interroger les modifications de chaque image en définissant la région d’intérêt, puis en obtenant l’ensemble actuel de surfaces spatiales.
- Pour un volume statique, tel qu’un cube à verrouillage universel couvrant une seule pièce, les applications peuvent s’inscrire pour que l’événement « surfaces modifiées » soit averti lorsque des surfaces spatiales à l’intérieur de ce volume ont peut-être changé.
- Traiter les modifications des surfaces
- Itérer l’ensemble de surfaces spatiales fourni.
- Classez les surfaces spatiales comme ajoutées, modifiées ou supprimées.
- Pour chaque surface spatiale ajoutée ou modifiée, le cas échéant, envoyez une demande asynchrone pour recevoir un maillage mis à jour représentant l’état actuel de la surface au niveau de détail souhaité.
- Traitez la demande de maillage asynchrone (pour plus d’informations dans les sections suivantes).
Mise en cache de maillage
Les surfaces spatiales sont représentées par des maillages de triangles denses. Le stockage, le rendu et le traitement de ces maillages peuvent consommer des ressources de calcul et de stockage importantes. Par conséquent, chaque application doit adopter un schéma de mise en cache de maillage adapté à ses besoins, afin de réduire au minimum les ressources utilisées pour le traitement et le stockage du maillage. Ce schéma doit déterminer les maillages à conserver et ceux à ignorer, et quand mettre à jour le maillage pour chaque surface spatiale.
La plupart des considérations abordées à cet égard vous indiquent directement comment votre application doit aborder la mise en cache de maillage. Vous devez prendre en compte la façon dont l’utilisateur se déplace dans l’environnement, quelles surfaces sont nécessaires, quand différentes surfaces seront observées et quand les modifications de l’environnement doivent être capturées.
Lors de l’interprétation de l’événement « surfaces modifiées » fourni par l’observateur de surface, la logique de mise en cache de maillage de base est la suivante :
- Si l’application voit un ID de surface spatiale qu’elle n’a pas vu auparavant, elle doit le traiter comme une nouvelle surface spatiale.
- Si l’application voit une surface spatiale avec un ID connu mais avec une nouvelle heure de mise à jour, elle doit la traiter comme une surface spatiale mise à jour.
- Si l’application ne voit plus une surface spatiale avec un ID connu, elle doit la traiter comme une surface spatiale supprimée.
C’est à chaque application de faire les choix suivants :
- Pour les nouvelles surfaces spatiales, le maillage doit-il être demandé ?
- En règle générale, le maillage doit être demandé immédiatement pour les nouvelles surfaces spatiales, ce qui peut fournir de nouvelles informations utiles à l’utilisateur.
- Toutefois, les nouvelles surfaces spatiales proches et devant l’utilisateur doivent être prioritaires et leur maillage doit être demandé en premier.
- Si le nouveau maillage n’est pas nécessaire, si, par exemple, l’application a « figé » définitivement ou temporairement son modèle de l’environnement, il ne doit pas être demandé.
- Pour les surfaces spatiales mises à jour, le maillage doit-il être demandé ?
- Les surfaces spatiales mises à jour près et devant l’utilisateur doivent être prioritaires et leur maillage doit être demandé en premier.
- Il peut également être approprié d’accorder une priorité plus élevée aux nouvelles surfaces qu’aux surfaces mises à jour, en particulier pendant l’expérience de balayage.
- Pour limiter les coûts de traitement, les applications peuvent souhaiter limiter la vitesse à laquelle elles traitent les mises à jour des surfaces spatiales.
- Il peut être possible de déduire que les modifications apportées à une surface spatiale sont mineures, par exemple si les limites de la surface sont petites, auquel cas la mise à jour peut ne pas être suffisamment importante pour être traitées.
- Mises à jour aux surfaces spatiales en dehors de la zone d’intérêt actuelle de l’utilisateur peut être ignorée entièrement, bien que dans ce cas, il soit plus efficace de modifier les volumes de délimitation spatiale utilisés par l’observateur de surface.
- Pour les surfaces spatiales supprimées, le maillage doit-il être ignoré ?
- En règle générale, le maillage doit être ignoré immédiatement pour les surfaces spatiales supprimées, afin que l’occlusion de l’hologramme reste correcte.
- Toutefois, si l’application a des raisons de croire qu’une surface spatiale réapparaîtra bientôt (en fonction de la conception de l’expérience utilisateur), il peut être plus efficace de la conserver que de supprimer son maillage et de la recréer ultérieurement.
- Si l’application crée un modèle à grande échelle de l’environnement de l’utilisateur, il se peut qu’elle ne souhaite pas du tout ignorer les maillages. Il devra toutefois limiter l’utilisation des ressources, éventuellement en mettant en file d’attente des maillages sur le disque à mesure que les surfaces spatiales disparaissent.
- Certains événements relativement rares pendant la génération de surface spatiale peuvent entraîner le remplacement de surfaces spatiales par de nouvelles surfaces spatiales dans un emplacement similaire, mais avec des ID différents. Par conséquent, les applications qui choisissent de ne pas abandonner une surface supprimée doivent veiller à ne pas se retrouver avec plusieurs maillages de surfaces spatiales très superposés couvrant le même emplacement.
- Le maillage doit-il être ignoré pour toutes les autres surfaces spatiales ?
- Même si une surface spatiale existe, si elle n’est plus utile à l’expérience de l’utilisateur, elle doit être ignorée. Par exemple, si l’application « remplace » la pièce située de l’autre côté d’une porte par un autre espace virtuel, les surfaces spatiales de cette pièce n’ont plus d’importance.
Voici un exemple de stratégie de mise en cache de maillage, utilisant l’hystérésis spatiale et temporelle :
- Prenons l’exemple d’une application qui souhaite utiliser un volume spatial d’intérêt en forme de frustum qui suit le regard de l’utilisateur à mesure qu’il regarde autour de lui et qu’il se déplace.
- Une surface spatiale peut disparaître temporairement de ce volume simplement parce que l’utilisateur s’éloigne de la surface ou s’éloigne de celle-ci... seulement pour regarder en arrière ou se rapprocher à nouveau un instant plus tard. Dans ce cas, l’abandon et la recréation du maillage pour cette surface représentent de nombreux traitements redondants.
- Pour réduire le nombre de modifications traitées, l’application utilise deux observateurs de surface spatiale, l’un contenu dans l’autre. Le plus grand volume est sphérique et suit l’utilisateur « paresseux » ; il se déplace uniquement si nécessaire pour s’assurer que son centre se trouve à moins de 2 mètres de l’utilisateur.
- Les maillages de surface spatiale nouveaux et mis à jour sont toujours traités à partir de l’observateur de surface interne plus petit, mais les maillages sont mis en cache jusqu’à ce qu’ils disparaissent de l’observateur de surface externe plus grand. Cela permet à l’application d’éviter de traiter de nombreuses modifications redondantes en raison du déplacement de l’utilisateur local.
- Étant donné qu’une surface spatiale peut également disparaître temporairement en raison d’une perte de suivi, l’application reporte également l’abandon des surfaces spatiales supprimées pendant la perte de suivi.
- En général, une application doit évaluer le compromis entre un traitement réduit des mises à jour et une utilisation accrue de la mémoire pour déterminer sa stratégie de mise en cache idéale.
Interprétation
Il existe trois méthodes principales dans lesquelles les maillages de mappage spatial ont tendance à être utilisés pour le rendu :
- Pour la visualisation de surface
- Il est souvent utile de visualiser directement les surfaces spatiales. Par exemple, le fait de diffuser des « ombres » à partir d’objets sur des surfaces spatiales peut fournir un retour visuel utile à l’utilisateur lorsqu’il place des hologrammes sur des surfaces.
- Une chose à garder à l’esprit est que les maillages spatiaux sont différents du type de mailles qu’un artiste 3D peut créer. La topologie de triangle ne sera pas aussi « propre » que la topologie créée par l’homme, et le maillage subira diverses erreurs.
- Pour créer une esthétique visuelle agréable, vous pouvez effectuer un traitement de maillage, par exemple pour remplir des trous ou des normales de surface lisses. Vous pouvez également utiliser un nuanceur pour projeter des textures conçues par un artiste sur votre maillage au lieu de visualiser directement la topologie et les normales de maillage.
- Pour l’occluding des hologrammes derrière des surfaces réelles
- Les surfaces spatiales peuvent être rendues dans une passe de profondeur uniquement, ce qui affecte uniquement la mémoire tampon de profondeur et n’affecte pas les cibles de rendu de couleur.
- Cela permet à la mémoire tampon de profondeur d’obstruer les hologrammes rendus par la suite derrière des surfaces spatiales. L’occlusion précise des hologrammes améliore le sentiment que les hologrammes existent réellement dans l’espace physique de l’utilisateur.
- Pour activer le rendu en profondeur uniquement, mettez à jour l’état de fusion pour définir RenderTargetWriteMask sur zéro pour toutes les cibles de rendu de couleur.
- Pour modifier l’apparence des hologrammes obstrués par des surfaces réelles
- La géométrie normalement rendue est masquée lorsqu’elle est masquée. Pour ce faire, définissez la fonction de profondeur dans votre état de gabarit de profondeur sur « inférieur ou égal », ce qui rend la géométrie visible uniquement là où elle est plus proche de l’appareil photo que toutes les géométries précédemment rendues.
- Toutefois, il peut être utile de garder une certaine géométrie visible même lorsqu’elle est masquée et de modifier son apparence lorsqu’elle est masquée pour fournir un retour visuel à l’utilisateur. Par exemple, cela permet à l’application de montrer à l’utilisateur l’emplacement d’un objet tout en indiquant clairement qu’il se trouve derrière une surface réelle.
- Pour ce faire, restituez la géométrie une deuxième fois avec un nuanceur différent qui crée l’apparence « occluded » souhaitée. Avant de restituer la géométrie pour la deuxième fois, apportez deux modifications à l’état de votre gabarit de profondeur. Tout d’abord, définissez la fonction de profondeur sur « supérieur ou égal » afin que la géométrie soit visible uniquement là où elle se trouve plus loin de la caméra que toutes les géométries précédemment rendues. Ensuite, définissez DepthWriteMask sur zéro afin que la mémoire tampon de profondeur ne soit pas modifiée (la mémoire tampon de profondeur doit continuer à représenter la profondeur de la géométrie la plus proche de la caméra).
Les performances sont un problème important lors du rendu des maillages de mappage spatial. Voici quelques techniques de performances de rendu spécifiques au rendu des maillages de mappage spatial :
- Ajuster la densité du triangle
- Lorsque vous demandez des maillages de surface spatiale à votre observateur de surface, demandez la plus faible densité de maillages de triangles qui sera suffisante pour vos besoins.
- Il peut être judicieux de varier la densité du triangle sur une surface en fonction de la surface, en fonction de la distance de la surface par rapport à l’utilisateur et de sa pertinence pour l’expérience utilisateur.
- La réduction du nombre de triangles réduit l’utilisation de la mémoire et les coûts de traitement des vertex sur le GPU, bien que cela n’affecte pas les coûts de traitement des pixels.
- Utiliser l’élimination des frustums
- L’élimination des frustums ignore les objets dessin qui ne peuvent pas être vus, car ils se trouvent en dehors du frustum d’affichage actuel. Cela réduit les coûts de traitement processeur et GPU.
- Étant donné que l’élimination est effectuée sur une base par maillage et que les surfaces spatiales peuvent être volumineuses, le fractionnement de chaque maillage de surface spatiale en blocs plus petits peut entraîner un abattage plus efficace (en ce que moins de triangles hors écran sont rendus). Il y a cependant un compromis ; Plus vous avez de maillages, plus vous devez effectuer des appels de dessin, ce qui peut augmenter les coûts du processeur. Dans un cas extrême, les calculs d’élimination des frustums eux-mêmes pourraient même avoir un coût de processeur mesurable.
- Ajuster l’ordre de rendu
- Les surfaces spatiales ont tendance à être grandes, car elles représentent l’environnement entier de l’utilisateur qui les entoure. Les coûts de traitement des pixels sur le GPU peuvent être élevés, en particulier dans les cas où il existe plusieurs couches de géométrie visible (y compris les surfaces spatiales et d’autres hologrammes). Dans ce cas, la couche la plus proche de l’utilisateur obludera toutes les couches plus éloignées, de sorte que tout temps passé par GPU à restituer ces couches plus distantes est gaspiller.
- Pour réduire ce travail redondant sur le GPU, il est utile de rendre les surfaces opaques dans l’ordre avant-arrière (les plus proches en premier, les plus éloignées en dernier). Par « opaque », nous entendons les surfaces pour lesquelles DepthWriteMask est défini sur un dans votre état de gabarit de profondeur. Lorsque les surfaces les plus proches sont rendues, elles amorcent la mémoire tampon de profondeur afin que les surfaces plus distantes soient ignorées efficacement par le processeur de pixels sur le GPU.
Traitement de maillage
Une application peut souhaiter effectuer diverses opérations sur des maillages de surface spatiale en fonction de ses besoins. Les données d’index et de vertex fournies avec chaque maillage de surface spatiale utilisent la même disposition que les mémoires tampons de vertex et d’index utilisées pour le rendu des maillages de triangles dans toutes les API de rendu modernes. Toutefois, l’un des faits clés à connaître est que les triangles de mappage spatial ont un ordre de enroulement dans le sens des aiguilles d’une montre. Chaque triangle est représenté par trois index de vertex dans la mémoire tampon d’index du maillage et ces index identifient les sommets du triangle dans le sens des aiguilles d’une montre, lorsque le triangle est affiché à partir du côté avant . Le côté avant (ou extérieur) des maillages de surface spatiale correspond au côté avant (visible) des surfaces réelles.
Les applications ne doivent simplifier le maillage que si la densité de triangle la plus grossière fournie par l’observateur de surface n’est toujours pas assez grossière : ce travail est coûteux en calcul et est déjà effectué par le runtime pour générer les différents niveaux de détail fournis.
Étant donné que chaque observateur de surface peut fournir plusieurs surfaces spatiales non connectées, certaines applications peuvent souhaiter couper ces maillages de surface spatiale les uns contre les autres, puis les compresser ensemble. En général, l’étape de découpage est nécessaire, car les maillages de surface spatiales proches se chevauchent souvent légèrement.
Raycasting et collision
Pour qu’une API physique (telle que Havok) fournisse une application avec des fonctionnalités de raycasting et de collision pour les surfaces spatiales, l’application doit fournir des maillages de surface spatiale à l’API physique. Les maillages utilisés pour la physique ont souvent les propriétés suivantes :
- Ils ne contiennent que de petits nombres de triangles. Les opérations physiques sont plus gourmandes en calcul que les opérations de rendu.
- Ils sont « étanches à l’eau ». Les surfaces destinées à être solides ne doivent pas comporter de petits trous ; même les trous trop petits pour être visibles peuvent causer des problèmes.
- Ils sont convertis en coques convexes. Les coques convexes ont peu de polygones et sont exemptes de trous, et elles sont beaucoup plus efficaces de calcul à traiter que les maillages de triangle bruts.
Lorsque vous effectuez des raycasts sur des surfaces spatiales, gardez à l’esprit que ces surfaces sont souvent complexes, des formes encombrées pleines de petits détails désordonnés - tout comme votre bureau ! Cela signifie qu’un seul raycast est souvent insuffisant pour vous fournir suffisamment d’informations sur la forme de la surface et la forme de l’espace vide près de celle-ci. Il est généralement judicieux d’effectuer de nombreux raycasts dans une petite zone et d’utiliser les résultats agrégés pour en tirer une compréhension plus fiable de la surface. Par exemple, l’utilisation de la moyenne de 10 raycasts pour guider le placement de l’hologramme sur une surface produit un résultat beaucoup plus lisse et moins « nerveux » que l’utilisation d’un seul raycast.
Toutefois, gardez à l’esprit que chaque raycast peut avoir un coût de calcul élevé. Selon votre scénario d’utilisation, vous devez faire un compromis entre le coût de calcul des raycasts supplémentaires (effectués chaque trame) et le coût de calcul du traitement de maillage pour lisser et supprimer les trous dans les surfaces spatiales (lorsque les maillages spatiaux sont mis à jour).
Expérience d’analyse de l’environnement
Chaque application qui utilise le mappage spatial doit envisager de fournir une « expérience d’analyse » ; processus par lequel l’application guide l’utilisateur pour analyser les surfaces nécessaires au bon fonctionnement de l’application.

Exemple d’analyse
La nature de cette expérience d’analyse peut varier considérablement en fonction des besoins de chaque application, mais deux principes main devraient guider sa conception.
Tout d’abord, la communication claire avec l’utilisateur est la principale préoccupation. L’utilisateur doit toujours savoir si les exigences de l’application sont remplies. Lorsqu’ils ne sont pas respectés, l’utilisateur doit savoir immédiatement pourquoi il en est ainsi et il doit être rapidement amené à prendre les mesures appropriées.
Deuxièmement, les applications doivent tenter d’établir un équilibre entre efficacité et fiabilité. Lorsqu’il est possible de le faire de manière fiable, les applications doivent analyser automatiquement les données de mappage spatial pour gagner du temps à l’utilisateur. Lorsqu’il n’est pas possible de le faire de manière fiable, les applications doivent à la place permettre à l’utilisateur de fournir rapidement à l’application les informations supplémentaires dont elle a besoin.
Pour vous aider à concevoir l’expérience d’analyse appropriée, tenez compte des possibilités suivantes qui s’appliquent à votre application :
Aucune expérience d’analyse
- Une application peut fonctionner parfaitement sans expérience d’analyse guidée ; il découvrira les surfaces qui sont observées au cours du mouvement naturel de l’utilisateur.
- Par exemple, une application qui permet à l’utilisateur de dessiner sur des surfaces avec de la peinture holographique par pulvérisation ne nécessite que la connaissance des surfaces actuellement visibles par l’utilisateur.
- L’environnement peut être déjà analysé s’il s’agit d’un environnement dans lequel l’utilisateur a déjà passé beaucoup de temps à utiliser HoloLens.
- Gardez toutefois à l’esprit que la caméra utilisée par le mappage spatial ne peut voir que 3,1 m devant l’utilisateur, de sorte que le mappage spatial ne connaîtra pas les surfaces plus distantes, sauf si l’utilisateur les a observées à une distance plus proche dans le passé.
- Pour que l’utilisateur comprenne quelles surfaces ont été analysées, l’application doit fournir un retour visuel à cet effet. Par exemple, la diffusion d’ombres virtuelles sur des surfaces numérisées peut aider l’utilisateur à placer des hologrammes sur ces surfaces.
- Dans ce cas, les volumes englobants de l’observateur de surface spatiale doivent être mis à jour chaque image vers un système de coordonnées spatiales verrouillée par le corps, afin qu’ils suivent l’utilisateur.
Trouver un emplacement approprié
- Une application peut être conçue pour être utilisée dans un emplacement avec des exigences spécifiques.
- Par exemple, l’application peut nécessiter une zone vide autour de l’utilisateur afin qu’il puisse pratiquer en toute sécurité le kung-fu holographique.
- Les applications doivent communiquer les exigences spécifiques à l’utilisateur à l’avance et les renforcer avec des commentaires visuels clairs.
- Dans cet exemple, l’application doit visualiser l’étendue de la zone vide requise et mettre en surbrillance visuellement la présence d’objets indésirables dans cette zone.
- Dans ce cas, les volumes englobants de l’observateur de surface spatiale doivent utiliser un système de coordonnées spatiales verrouillées dans le monde à l’emplacement choisi.
Trouver une configuration appropriée des surfaces
- Une application peut nécessiter une configuration spécifique de surfaces, par exemple deux grands murs plats et opposés pour créer une salle holographique de miroirs.
- Dans ce cas, l’application doit analyser les surfaces fournies par le mappage spatial pour détecter les surfaces appropriées et diriger l’utilisateur vers celles-ci.
- L’utilisateur doit disposer d’une option de secours si l’analyse de la surface de l’application n’est pas fiable. Par exemple, si l’application identifie incorrectement une porte comme un mur plat, l’utilisateur a besoin d’un moyen simple de corriger cette erreur.
Analyser une partie de l’environnement
- Une application peut souhaiter capturer uniquement une partie de l’environnement, comme indiqué par l’utilisateur.
- Par exemple, l’application analyse une partie d’une pièce afin que l’utilisateur puisse publier une annonce classifiée holographique pour les meubles qu’il souhaite vendre.
- Dans ce cas, l’application doit capturer les données de mappage spatial dans les régions observées par l’utilisateur pendant son analyse.
Analyser toute la pièce
- Une application peut nécessiter une analyse de toutes les surfaces de la pièce actuelle, y compris celles situées derrière l’utilisateur.
- Par exemple, un jeu peut mettre l’utilisateur dans le rôle de Gulliver, assiégé par des centaines de minuscules Lilliputiens qui approchent de toutes les directions.
- Dans ce cas, l’application doit déterminer le nombre de surfaces de la pièce actuelle qui ont déjà été analysées et diriger le regard de l’utilisateur pour combler les lacunes importantes.
- La clé de ce processus consiste à fournir des commentaires visuels qui indiquent clairement à l’utilisateur quelles surfaces n’ont pas encore été analysées. L’application peut, par exemple, utiliser le brouillard basé sur la distance pour mettre en surbrillance visuellement des régions qui ne sont pas couvertes par des surfaces de mappage spatial.
Prendre une instantané initiale de l’environnement
- Une application peut souhaiter ignorer toutes les modifications apportées à l’environnement après avoir pris une « instantané » initiale.
- Cela peut être approprié pour éviter toute interruption des données créées par l’utilisateur qui sont étroitement couplées à l’état initial de l’environnement.
- Dans ce cas, l’application doit effectuer une copie des données de mappage spatial dans leur état initial une fois l’analyse terminée.
- Les applications doivent continuer à recevoir des mises à jour des données de mappage spatial si les hologrammes doivent toujours être correctement masqués par l’environnement.
- Les mises à jour continues des données de mappage spatial permettent également de visualiser toutes les modifications qui se sont produites, en clarifiant à l’utilisateur les différences entre les états antérieurs et actuels de l’environnement.
Prendre des instantanés initiés par l’utilisateur de l’environnement
- Une application ne peut souhaiter répondre aux changements environnementaux que lorsque l’utilisateur lui en donne la demande.
- Par exemple, l’utilisateur peut créer plusieurs « statues » 3D d’un ami en capturant ses poses à différents moments.
Autoriser l’utilisateur à modifier l’environnement
- Une application peut être conçue pour répondre en temps réel à toutes les modifications apportées dans l’environnement de l’utilisateur.
- Par exemple, l’utilisateur dessinant un rideau peut déclencher un « changement de scène » pour une lecture holographique qui se déroule de l’autre côté.
Guider l’utilisateur pour éviter les erreurs dans les données de mappage spatial
- Une application peut souhaiter fournir des conseils à l’utilisateur pendant qu’il analyse son environnement.
- Cela peut aider l’utilisateur à éviter certains types d’erreurs dans les données de mappage spatial, par exemple en restant loin des fenêtres ensoleillées ou des miroirs.
Un détail supplémentaire à connaître est que la « plage » de données de mappage spatial n’est pas illimitée. Bien que le mappage spatial crée une base de données permanente de grands espaces, il met uniquement ces données à la disposition des applications dans une « bulle » de taille limitée autour de l’utilisateur. Si vous commencez au début d’un long couloir et marchez assez loin du début, les surfaces spatiales de retour au début disparaîtront. Vous pouvez atténuer ce problème en mettant en cache ces surfaces dans votre application une fois qu’elles ont disparu des données de mappage spatiale disponibles.
Traitement de maillage
Cela peut aider à détecter les types courants d’erreurs dans les surfaces et à filtrer, supprimer ou modifier les données de mappage spatial le cas échéant.
Gardez à l’esprit que les données de mappage spatial sont conçues pour être aussi fidèles que possible aux surfaces réelles, de sorte que tout traitement que vous appliquez risque de déplacer vos surfaces plus loin de la « vérité ».
Voici quelques exemples de différents types de traitement de maillage que vous pouvez trouver utiles :
Remplissage des trous
- Si un petit objet fait d’un matériau sombre ne parvient pas à scanner, il laissera un trou dans la surface environnante.
- Les trous affectent l’occlusion : les hologrammes peuvent être vus « à travers » un trou dans une surface du monde réel soi-disant opaque.
- Les trous affectent les raycasts : si vous utilisez des raycasts pour aider les utilisateurs à interagir avec les surfaces, il peut être indésirable que ces rayons passent à travers les trous. L’une des mesures d’atténuation consiste à utiliser un ensemble de plusieurs raycasts couvrant une région de taille appropriée. Cela vous permettra de filtrer les résultats « hors norme », de sorte que même si un raycast traverse un petit trou, le résultat agrégé reste valide. Toutefois, cette approche a un coût de calcul.
- Les trous affectent les collisions physiques : un objet contrôlé par la simulation physique peut tomber à travers un trou dans le sol et se perdre.
- Il est possible de remplir de façon algorithmique de tels trous dans le maillage de surface. Toutefois, vous devrez régler votre algorithme afin que les « trous réels » tels que les fenêtres et les portes ne soient pas remplis. Il peut être difficile de différencier de manière fiable les « trous réels » des « trous imaginaires ». Vous devrez donc expérimenter différentes heuristiques telles que « taille » et « forme limite ».
Suppression de l’hallucination
- Les réflexions, les lumières vives et les objets en mouvement peuvent laisser de petites « hallucinations » persistantes flottant dans les airs.
- Les hallucinations affectent l’occlusion : les hallucinations peuvent devenir visibles sous forme de formes sombres se déplaçant devant et obludant d’autres hologrammes.
- Les hallucinations affectent les raycasts : si vous utilisez des raycasts pour aider les utilisateurs à interagir avec les surfaces, ces rayons peuvent frapper une hallucination au lieu de la surface derrière elle. Comme pour les trous, une atténuation consiste à utiliser de nombreux raycasts au lieu d’un seul raycast, mais là encore, cela aura un coût de calcul.
- Les hallucinations affectent les collisions physiques : un objet contrôlé par la simulation physique peut devenir coincé contre une hallucination et être incapable de se déplacer dans une zone apparemment claire de l’espace.
- Il est possible de filtrer ces hallucinations à partir du maillage de la surface. Toutefois, comme avec les trous, vous devrez régler votre algorithme afin que les objets de petite taille tels que les lampes et les poignées de porte ne soient pas enlevés.
Lissage
- Le mappage spatial peut retourner des surfaces qui semblent rugueuses ou « bruyantes » par rapport à leurs équivalents réels.
- La douceur affecte les collisions physiques : si le sol est rugueux, une balle de golf simulée physiquement peut ne pas rouler en douceur sur elle en ligne droite.
- La douceur affecte le rendu : si une surface est visualisées directement, les normales de surface rugueuses peuvent affecter son apparence et perturber un aspect « propre ». Il est possible d’atténuer ce problème en utilisant l’éclairage et les textures appropriés dans le nuanceur utilisé pour restituer la surface.
- Il est possible de lisser la rugosité dans un maillage de surface. Toutefois, cela peut pousser la surface plus loin de la surface réelle correspondante. Le maintien d’une correspondance étroite est important pour produire une occlusion hologramme précise et pour permettre aux utilisateurs d’obtenir des interactions précises et prévisibles avec les surfaces holographiques.
- Si seule une modification cosmétique est nécessaire, il peut être suffisant de lisser les normales de vertex sans modifier la position des vertex.
Recherche de plan
- Il existe de nombreuses formes d’analyse qu’une application peut souhaiter effectuer sur les surfaces fournies par le mappage spatial.
- Un exemple simple est la « recherche de plan » ; identification des régions délimitées, principalement planaires des surfaces.
- Les régions planaires peuvent être utilisées comme surfaces de travail holographiques, régions où le contenu holographique peut être placé automatiquement par l’application.
- Les régions planaires peuvent limiter l’interface utilisateur pour guider les utilisateurs à interagir avec les surfaces qui répondent le mieux à leurs besoins.
- Les régions planaires peuvent être utilisées comme dans le monde réel, pour des équivalents holographiques à des objets fonctionnels tels que des écrans LCD, des tables ou des tableaux blancs.
- Les régions planaires peuvent définir des zones de jeu, formant la base des niveaux de jeu vidéo.
- Les régions planaires peuvent aider les agents virtuels à naviguer dans le monde réel, en identifiant les zones de plancher sur lesquelles les personnes réelles sont susceptibles de marcher.
Prototypage et débogage
Outils utiles
- L’émulateur HoloLens peut être utilisé pour développer des applications à l’aide du mappage spatial sans accès à un HoloLens physique. Il vous permet de simuler une session en direct sur un HoloLens dans un environnement réaliste, avec toutes les données que votre application consommerait normalement, y compris le mouvement HoloLens, les systèmes de coordonnées spatiales et les maillages de mappage spatial. Cela peut être utilisé pour fournir une entrée fiable et reproductible, ce qui peut être utile pour le débogage des problèmes et l’évaluation des modifications apportées à votre code.
- Pour reproduire un scénario, capturez les données de mappage spatial sur le réseau à partir d’un HoloLens en direct, puis enregistrez-les sur disque et réutilisez-les dans des sessions de débogage ultérieures.
- La vue 3D du portail d’appareil Windows permet de voir toutes les surfaces spatiales actuellement disponibles via le système de mappage spatial. Cela fournit une base de comparaison pour les surfaces spatiales à l’intérieur de votre application. Par exemple, vous pouvez facilement déterminer si des surfaces spatiales sont manquantes ou affichées au mauvais endroit.
Conseils généraux sur le prototypage
- Étant donné que les erreurs dans les données de mappage spatial peuvent affecter fortement l’expérience de votre utilisateur, nous vous recommandons de tester votre application dans un large éventail d’environnements.
- Ne vous retrouvez pas dans l’habitude de toujours tester au même endroit, par exemple à votre bureau. Veillez à tester sur différentes surfaces de différentes positions, formes, tailles et matériaux.
- De même, bien que les données synthétiques ou enregistrées puissent être utiles pour le débogage, ne devenez pas trop dépendant des mêmes quelques cas de test. Cela peut retarder la recherche de problèmes importants que des tests plus variés auraient détectés plus tôt.
- Il est judicieux d’effectuer des tests avec des utilisateurs réels (et idéalement non associés), car ils peuvent ne pas utiliser HoloLens ou votre application exactement de la même façon que vous. En fait, il peut vous surprendre à quel point le comportement, les connaissances et les hypothèses des personnes divergentes peuvent être !
Résolution des problèmes
- Pour que les maillages de surface soient correctement orientés, chaque GameObject doit être actif avant d’être envoyé au SurfaceObserver pour que son maillage soit construit. Sinon, les mailles apparaîtront dans votre espace, mais pivotées à des angles bizarres.
- Le GameObject qui exécute le script qui communique avec le SurfaceObserver doit être défini sur l’origine. Sinon, tous les GameObjects que vous créez et envoyez au SurfaceObserver pour que leurs maillages aient été construits ont un décalage égal au décalage de l’objet jeu parent. Cela peut faire apparaître vos maillages à plusieurs mètres de distance, ce qui rend difficile le débogage de ce qui se passe.