このチュートリアルの前のステージでは、PyTorch を使用してデータ分析モデルをトレーニングするために使用するデータセットを取得しました。 今度は、そのデータを使用する番です。
PyTorch を使用してデータ分析モデルをトレーニングするには、次の手順を完了する必要があります。
- データを読み込みます。 このチュートリアルの前の手順を完了している場合は、既にこれに対応しています。
- ニューラル ネットワークを定義します。
- ロス関数を定義します。
- トレーニングデータでモデルを学習させます。
- テスト データに対してネットワークをテストします。
ニューラル ネットワークを定義する
このチュートリアルでは、3 つの線形レイヤーを持つ基本的なニューラル ネットワーク モデルを構築します。 モデルの構造は次のとおりです。
Linear -> ReLU -> Linear -> ReLU -> Linear
線形レイヤーは、受信データに線形変換を適用します。 入力フィーチャの数と、クラスの数に対応する出力フィーチャの数を指定する必要があります。
ReLU レイヤーは、すべての受信フィーチャを 0 以上に定義するアクティブ化関数です。 したがって、ReLU レイヤーを適用すると、0 未満の任意の数が 0 に変更され、他のレイヤーは同じままになります。 アクティブ化レイヤーは 2 つの非表示レイヤーに適用し、最後の線形レイヤーではアクティブ化しません。
モデル パラメーター
モデル パラメーターは、目標とトレーニング データによって異なります。 入力サイズは、モデルにフィードする特徴の数 (ここでは 4 つ) によって異なります。 出力サイズは、3 種類のあやめの可能性があるため 3 です。
(4,24) -> (24,24) -> (24,3)、3 つの線形レイヤーを持つネットワークには、744 の重み (96 + 576 +72) があります。
学習率 (lr) は、損失勾配を基にネットワークの重みを調整する量を決定します。 これを低くするほど、トレーニング速度は遅くなります。 このチュートリアルでは lr を 0.01 に設定します。
ネットワークのしくみ
ここでは、フィードフォワード ネットワークを構築しています。 トレーニング プロセス中に、ネットワークによって入力がすべての層で処理され、画像の予測ラベルが正しいものからどれだけ離れているかを理解するために損失が計算され、勾配がネットワークに伝播され、層の重みが更新されます。 ネットワークにより、入力の膨大なデータセットを反復処理することで、最良の結果が得られるように重みを設定することが "学習" されます。
前方関数は損失関数の値を計算し、下位関数は学習可能なパラメーターのグラデーションを計算します。 PyTorch を使用してニューラル ネットワークを作成する際に必要なのは、forward 関数を定義することだけです。 backward 関数は自動的に定義されます。
- 次のコードを Visual Studio の
DataClassifier.pyファイルにコピーして、モデル パラメーターとニューラル ネットワークを定義します。
# Define model parameters
input_size = list(input.shape)[1] # = 4. The input depends on how many features we initially feed the model. In our case, there are 4 features for every predict value
learning_rate = 0.01
output_size = len(labels) # The output is prediction results for three types of Irises.
# Define neural network
class Network(nn.Module):
def __init__(self, input_size, output_size):
super(Network, self).__init__()
self.layer1 = nn.Linear(input_size, 24)
self.layer2 = nn.Linear(24, 24)
self.layer3 = nn.Linear(24, output_size)
def forward(self, x):
x1 = F.relu(self.layer1(x))
x2 = F.relu(self.layer2(x1))
x3 = self.layer3(x2)
return x3
# Instantiate the model
model = Network(input_size, output_size)
また、PC で使用できるデバイスに基づいて実行デバイスを定義する必要もあります。 PyTorch には GPU 専用ライブラリはありませんが、実行デバイスを手動で定義できます。 デバイスは、コンピューター上に存在する場合は Nvidia GPU になり、存在しない場合は CPU になります。
- 次のコードをコピーして、実行デバイスを定義します。
# Define your execution device
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print("The model will be running on", device, "device\n")
model.to(device) # Convert model parameters and buffers to CPU or Cuda
- 最後の手順として、モデルを保存する関数を定義します。
# Function to save the model
def saveModel():
path = "./NetModel.pth"
torch.save(model.state_dict(), path)
注
PyTorch を使ったニューラルネットワークについてもっと学びたいと思いませんか? PyTorch のドキュメントを確認してください。
ロス関数を定義する
loss 関数により、出力が目標からどれだけ離れているかを推定する値が計算されます。 この主な目的は、ニューラル ネットワークで逆伝搬法によって重みのベクトル値を変更することで、loss 関数の値を小さくすることです。
損失値はモデルの精度とは異なります。 損失関数は、トレーニングセットに対する最適化の各イテレーション後におけるモデルの性能を表します。 モデルの精度はテスト データで計算され、正しい予測の割合が示されます。
PyTorch のニューラル ネットワーク パッケージには、ディープ ニューラル ネットワークの構成要素となるさまざまな loss 関数が含まれています。 これらの詳細について詳しく知りたい場合は、上記のメモを開始してください。 ここでは、このような分類用に最適化された既存の関数を使用し、分類クロス エントロピー損失関数と Adam オプティマイザーを使用します。 オプティマイザーでは、学習率 (lr) によって、損失の勾配に関してネットワークの重みを調整する量の制御が設定されます。 ここでは 0.001 として設定します。低いほど、トレーニングは遅くなります。
- Visual Studio で次のコードを
DataClassifier.pyファイルにコピーし、loss 関数とオプティマイザーを定義します。
# Define the loss function with Classification Cross-Entropy loss and an optimizer with Adam optimizer
loss_fn = nn.CrossEntropyLoss()
optimizer = Adam(model.parameters(), lr=0.001, weight_decay=0.0001)
トレーニングデータでモデルを学習させます。
モデルをトレーニングするには、データ反復子をループさせ、ネットワークに入力をフィードし、最適化する必要があります。 結果を検証するには、トレーニング エポックのたびに、予測されたラベルを検証データセット内の実際のラベルと比較するだけです。
プログラムは、トレーニングセットに対する各エポックまたはすべての完了したイテレーションごとに、トレーニングの損失、検証の損失、およびモデルの精度を表示します。 これは、最高の精度でモデルを保存し、10 エポック後、プログラムは最終的な精度を表示します。
- 次のコードを
DataClassifier.pyファイルに追加します
# Training Function
def train(num_epochs):
best_accuracy = 0.0
print("Begin training...")
for epoch in range(1, num_epochs+1):
running_train_loss = 0.0
running_accuracy = 0.0
running_vall_loss = 0.0
total = 0
# Training Loop
for data in train_loader:
#for data in enumerate(train_loader, 0):
inputs, outputs = data # get the input and real species as outputs; data is a list of [inputs, outputs]
optimizer.zero_grad() # zero the parameter gradients
predicted_outputs = model(inputs) # predict output from the model
train_loss = loss_fn(predicted_outputs, outputs) # calculate loss for the predicted output
train_loss.backward() # backpropagate the loss
optimizer.step() # adjust parameters based on the calculated gradients
running_train_loss +=train_loss.item() # track the loss value
# Calculate training loss value
train_loss_value = running_train_loss/len(train_loader)
# Validation Loop
with torch.no_grad():
model.eval()
for data in validate_loader:
inputs, outputs = data
predicted_outputs = model(inputs)
val_loss = loss_fn(predicted_outputs, outputs)
# The label with the highest value will be our prediction
_, predicted = torch.max(predicted_outputs, 1)
running_vall_loss += val_loss.item()
total += outputs.size(0)
running_accuracy += (predicted == outputs).sum().item()
# Calculate validation loss value
val_loss_value = running_vall_loss/len(validate_loader)
# Calculate accuracy as the number of correct predictions in the validation batch divided by the total number of predictions done.
accuracy = (100 * running_accuracy / total)
# Save the model if the accuracy is the best
if accuracy > best_accuracy:
saveModel()
best_accuracy = accuracy
# Print the statistics of the epoch
print('Completed training batch', epoch, 'Training Loss is: %.4f' %train_loss_value, 'Validation Loss is: %.4f' %val_loss_value, 'Accuracy is %d %%' % (accuracy))
テスト データに対してモデルをテストします。
モデルのトレーニングが完了したので、テスト データセットを使用してモデルをテストできます。
2 つのテスト関数を追加します。 最初のテストでは、前のパートで保存したモデルをテストします。 45 項目のテスト データ セットでモデルをテストし、モデルの精度を出力します。 2 番目はオプションの関数であり、3 つのアヤメの種のそれぞれを予測する際のモデルの信頼度をテストします。信頼度は、それぞれの種の分類が成功する確率で表されます。
- 次のコードを
DataClassifier.pyファイルに追加します。
# Function to test the model
def test():
# Load the model that we saved at the end of the training loop
model = Network(input_size, output_size)
path = "NetModel.pth"
model.load_state_dict(torch.load(path))
running_accuracy = 0
total = 0
with torch.no_grad():
for data in test_loader:
inputs, outputs = data
outputs = outputs.to(torch.float32)
predicted_outputs = model(inputs)
_, predicted = torch.max(predicted_outputs, 1)
total += outputs.size(0)
running_accuracy += (predicted == outputs).sum().item()
print('Accuracy of the model based on the test set of', test_split ,'inputs is: %d %%' % (100 * running_accuracy / total))
# Optional: Function to test which species were easier to predict
def test_species():
# Load the model that we saved at the end of the training loop
model = Network(input_size, output_size)
path = "NetModel.pth"
model.load_state_dict(torch.load(path))
labels_length = len(labels) # how many labels of Irises we have. = 3 in our database.
labels_correct = list(0. for i in range(labels_length)) # list to calculate correct labels [how many correct setosa, how many correct versicolor, how many correct virginica]
labels_total = list(0. for i in range(labels_length)) # list to keep the total # of labels per type [total setosa, total versicolor, total virginica]
with torch.no_grad():
for data in test_loader:
inputs, outputs = data
predicted_outputs = model(inputs)
_, predicted = torch.max(predicted_outputs, 1)
label_correct_running = (predicted == outputs).squeeze()
label = outputs[0]
if label_correct_running.item():
labels_correct[label] += 1
labels_total[label] += 1
label_list = list(labels.keys())
for i in range(output_size):
print('Accuracy to predict %5s : %2d %%' % (label_list[i], 100 * labels_correct[i] / labels_total[i]))
最後に、メイン コードを追加します。 これで、モデルのトレーニングが開始され、モデルが保存され、結果が画面に表示されます。 ここではトレーニング セットに対して [num_epochs = 25] という 2 回の反復処理を実行するだけなので、トレーニング プロセスにはそれほど時間はかかりません。
- 次のコードを
DataClassifier.pyファイルに追加します。
if __name__ == "__main__":
num_epochs = 10
train(num_epochs)
print('Finished Training\n')
test()
test_species()
テストを実行しましょう。 上部のツール バーのドロップダウン メニューが Debug に設定されていることを確認します。 Solution Platformをx64に変更して、デバイスが 64 ビットの場合はローカル コンピューターでプロジェクトを実行するか、32 ビットの場合はx86します。
- プロジェクトを実行するには、ツール バーの [
Start Debugging] ボタンをクリックするか、F5を押します。
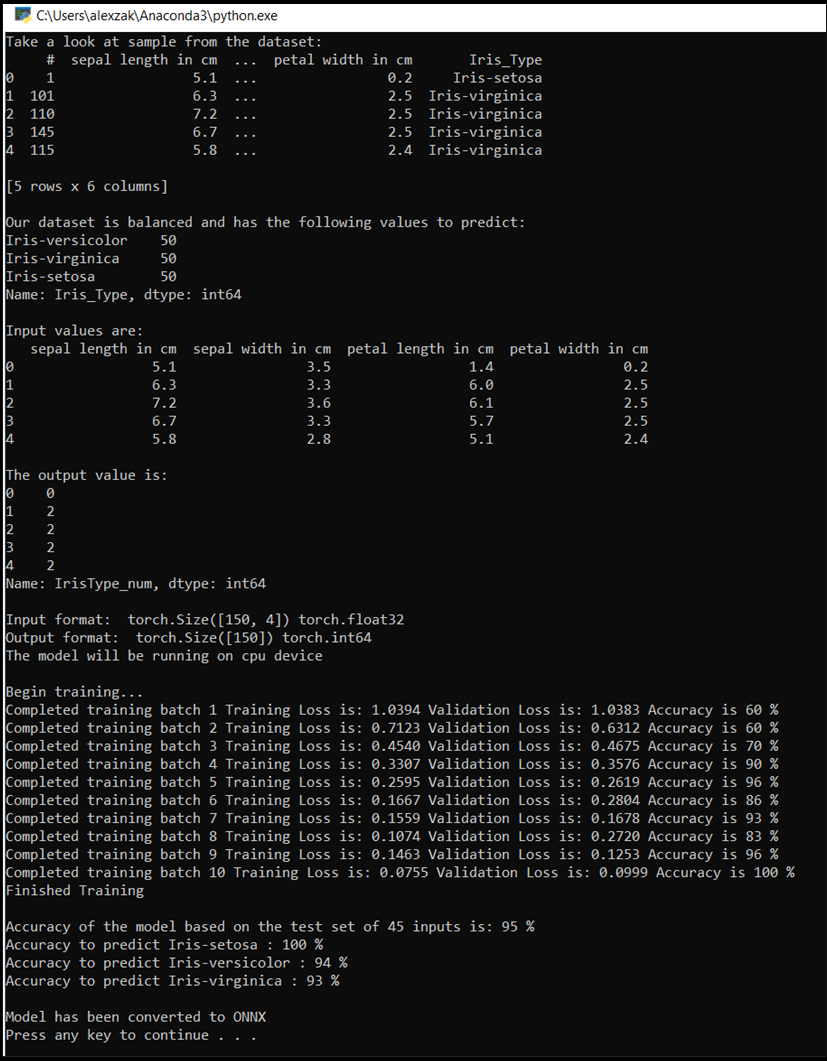
コンソール ウィンドウがポップアップ表示され、トレーニングのプロセスが表示されます。 定義したとおり、損失値はすべてのエポックに出力されます。 期待は、すべてのループで損失値が減少することです。
トレーニングが完了すると、次のような出力が表示されます。 数値はまったく同じではなく、トレーニングは多くの要因に依存し、常に識別可能な結果が返されるとは限りませんが、似ているはずです。
次のステップ
分類モデルが作成されたので、次の手順は モデルを ONNX 形式に変換することです。