TartanAir: AirSim-simulatiegegevensset voor gelijktijdige lokalisatie en toewijzing (SLAM)
Simultaneous Localization and Mapping (SLAM) is een van de belangrijkste functies die is vereist voor robots. Dankzij de overal aanwezige beschikbaarheid van afbeeldingen is Visual SLAM (V-SLAM) een belangrijk onderdeel van veel autonome systemen. Er is veel vooruitgang geboekt met op geometrie en machine learning gebaseerde methoden. Het ontwikkelen van robuuste en betrouwbare SLAM-methoden voor echte toepassingen is echter nog een hele uitdaging. Echte omgevingen bevatten factoren die het lastig maken, zoals wijzigingen in de lichtomstandigheden, te weinig licht, dynamische objecten en omgevingen zonder textuur. Deze gegevensset maakt gebruik van de geavanceerde computer graphics-technologie en is bedoeld voor diverse scenario's die een uitdaging vormen voor simulatie.
Notitie
Microsoft biedt Azure Open Datasets op basis van 'zoals is'. Microsoft geeft geen garanties, uitdrukkelijk of impliciet, garanties of voorwaarden met betrekking tot uw gebruik van de gegevenssets. Voor zover toegestaan volgens uw lokale wetgeving, wijst Microsoft alle aansprakelijkheid af voor eventuele schade of verliezen, waaronder directe, gevolgschade, speciale, indirecte, incidentele of strafbare gegevenssets, die het gevolg zijn van uw gebruik van de gegevenssets.
Deze gegevensset wordt geleverd onder de oorspronkelijke voorwaarden dat Microsoft de brongegevens heeft ontvangen. De gegevensset kan gegevens bevatten die afkomstig zijn van Microsoft.
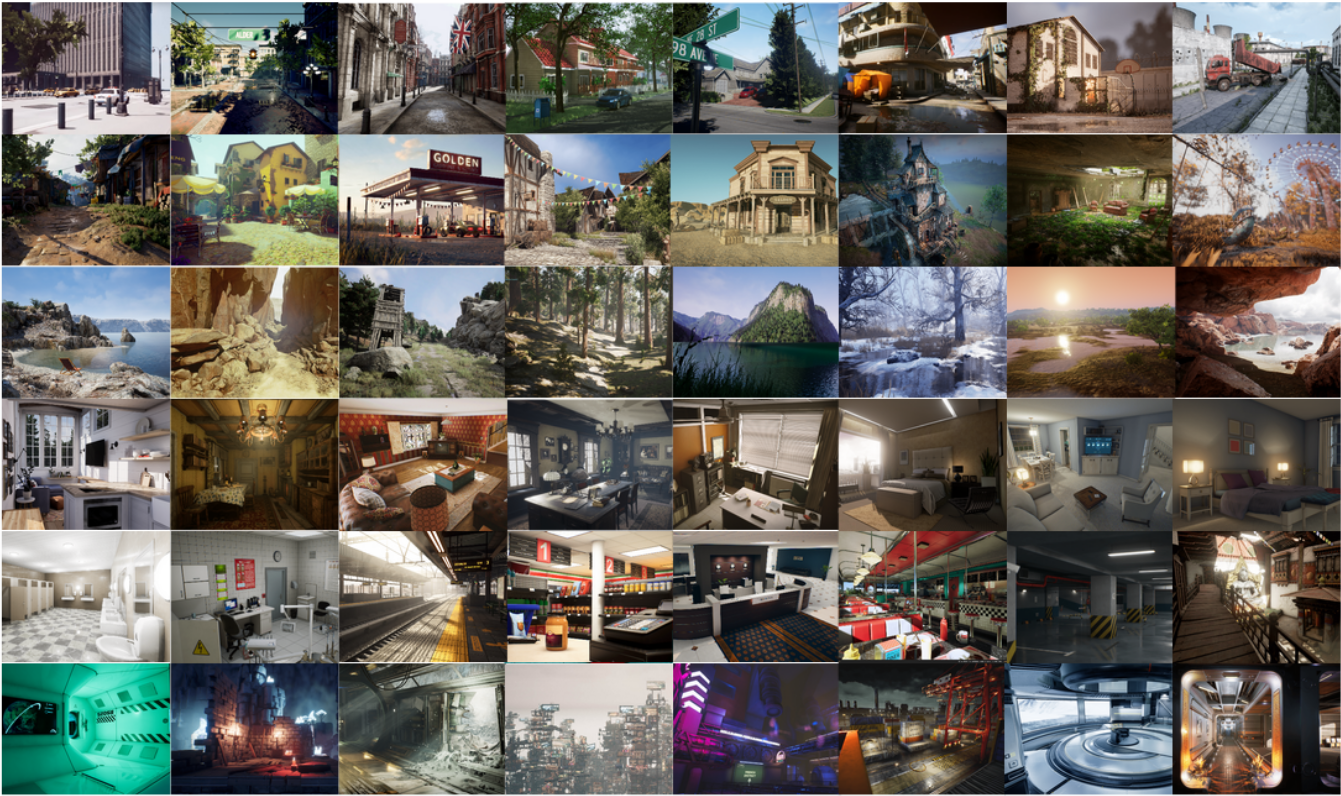
De gegevens worden verzameld in fotorealistische simulatieomgevingen in aanwezigheid van verschillende lichtomstandigheden, weer en bewegende objecten. Door gegevens tijdens een simulatie te verzamelen, kunnen we multimodale sensorgegevens en exacte ground-truth-labels verkrijgen, zoals stereo-RGB-afbeeldingen, diepteafbeeldingen, segmentering, optische stromen en cameraposities. We hebben een groot aantal omgevingen ingesteld met verschillende stijlen en scenario's om uitdagende standpunten en diverse bewegingspatronen aan te kunnen die moeilijk te realiseren zijn met fysieke gegevensverzamelingsplatforms. De vier belangrijkste functies van onze gegevensset zijn: 1) Grote, uiteenlopende realistische gegevens; 2) Multimodale grond waarheidslabels; 3) Diversiteit aan bewegingspatronen; 4) Uitdagende scènes.
Deze gegevensset biedt vijf typen gegevens:
- Stereo-installatiekopieën: afbeeldingstype (PNG)
- Dieptebestand: numpy-type (NPY)
- Segmentatiebestand: numpy-type (NPY)
- Optische stroombestand: numpy-type (NPY)
- Camerahoudingsbestand: teksttype (TXT)
Het wordt verzameld uit verschillende omgevingen, bevat in totaal honderden trajecten (3 TB) vanaf 2019.
Uitdagende visuele effecten
In sommige simulaties simuleert de gegevensset meerdere soorten uitdagende visuele effecten.
- Moeilijke lichtomstandigheden. Afwisselen dag en nacht. Weinig licht. Snel veranderende verlichtingen.
- Weerseffecten. Helder, regen, sneeuw, wind en mist.
- Seizoensveranderingen.
Opslaglocatie
Deze gegevensset wordt opgeslagen in de Azure-regio US - oost. Het wordt aanbevolen om rekenresources in US - oost toe te wijzen voor affiniteit.
Licentievoorwaarden
Dit project wordt vrijgegeven onder de MIT-licentie. Raadpleeg het licentiebestand voor meer informatie.
Aanvullende informatie
Bekijk de officiële TartanAir website of bekijk het originele onderzoeksdocument.
Stuur een e-mail naar tartanair@hotmail.com als u vragen hebt over de gegevensbron. U kunt ook contact opnemen met de bijdragers via de betreffende GitHub.
Citation More technical details are available in AirSim paper (FSR 2017 Conference). Citeer dit als:
@article{tartanair2020arxiv,
title = {TartanAir: A Dataset to Push the Limits of Visual SLAM},
author = {Wenshan Wang, Delong Zhu, Xiangwei Wang, Yaoyu Hu, Yuheng Qiu, Chen Wang, Yafei Hu, Ashish Kapoor, Sebastian Scherer},
journal = {arXiv preprint arXiv:2003.14338},
year = {2020},
url = {https://arxiv.org/abs/2003.14338}
}
@inproceedings{airsim2017fsr,
author = {Shital Shah and Debadeepta Dey and Chris Lovett and Ashish Kapoor},
title = {AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles},
year = {2017},
booktitle = {Field and Service Robotics},
eprint = {arXiv:1705.05065},
url = {https://arxiv.org/abs/1705.05065}
}
Toegang tot gegevens
Gebruik het volgende codevoorbeeld om toegang te krijgen tot de gegevens in een Python-notebook.
Afhankelijkheden
pip install numpy
pip install azure-storage-blob
pip install opencv-python
Import- en containerclient
from azure.storage.blob import ContainerClient
import numpy as np
import io
import cv2
import time
import matplotlib.pyplot as plt
%matplotlib inline
# Dataset website: http://theairlab.org/tartanair-dataset/
account_url = 'https://tartanair.blob.core.windows.net/'
container_name = 'tartanair-release1'
container_client = ContainerClient(account_url=account_url,
container_name=container_name,
credential=None)
Omgevingen en trajecten
def get_environment_list():
'''
List all the environments shown in the root directory
'''
env_gen = container_client.walk_blobs()
envlist = []
for env in env_gen:
envlist.append(env.name)
return envlist
def get_trajectory_list(envname, easy_hard = 'Easy'):
'''
List all the trajectory folders, which is named as 'P0XX'
'''
assert(easy_hard=='Easy' or easy_hard=='Hard')
traj_gen = container_client.walk_blobs(name_starts_with=envname + '/' + easy_hard+'/')
trajlist = []
for traj in traj_gen:
trajname = traj.name
trajname_split = trajname.split('/')
trajname_split = [tt for tt in trajname_split if len(tt)>0]
if trajname_split[-1][0] == 'P':
trajlist.append(trajname)
return trajlist
def _list_blobs_in_folder(folder_name):
"""
List all blobs in a virtual folder in an Azure blob container
"""
files = []
generator = container_client.list_blobs(name_starts_with=folder_name)
for blob in generator:
files.append(blob.name)
return files
def get_image_list(trajdir, left_right = 'left'):
assert(left_right == 'left' or left_right == 'right')
files = _list_blobs_in_folder(trajdir + '/image_' + left_right + '/')
files = [fn for fn in files if fn.endswith('.png')]
return files
def get_depth_list(trajdir, left_right = 'left'):
assert(left_right == 'left' or left_right == 'right')
files = _list_blobs_in_folder(trajdir + '/depth_' + left_right + '/')
files = [fn for fn in files if fn.endswith('.npy')]
return files
def get_flow_list(trajdir, ):
files = _list_blobs_in_folder(trajdir + '/flow/')
files = [fn for fn in files if fn.endswith('flow.npy')]
return files
def get_flow_mask_list(trajdir, ):
files = _list_blobs_in_folder(trajdir + '/flow/')
files = [fn for fn in files if fn.endswith('mask.npy')]
return files
def get_posefile(trajdir, left_right = 'left'):
assert(left_right == 'left' or left_right == 'right')
return trajdir + '/pose_' + left_right + '.txt'
def get_seg_list(trajdir, left_right = 'left'):
assert(left_right == 'left' or left_right == 'right')
files = _list_blobs_in_folder(trajdir + '/seg_' + left_right + '/')
files = [fn for fn in files if fn.endswith('.npy')]
return files
Lijst met omgevingen weergeven
envlist = get_environment_list()
print('Find {} environments..'.format(len(envlist)))
print(envlist)
Trajecten 'Easy' vermelden in de eerste omgeving
diff_level = 'Easy'
env_ind = 0
trajlist = get_trajectory_list(envlist[env_ind], easy_hard = diff_level)
print('Find {} trajectories in {}'.format(len(trajlist), envlist[env_ind]+diff_level))
print(trajlist)
Alle gegevensbestanden in één traject weergeven
traj_ind = 1
traj_dir = trajlist[traj_ind]
left_img_list = get_image_list(traj_dir, left_right = 'left')
print('Find {} left images in {}'.format(len(left_img_list), traj_dir))
right_img_list = get_image_list(traj_dir, left_right = 'right')
print('Find {} right images in {}'.format(len(right_img_list), traj_dir))
left_depth_list = get_depth_list(traj_dir, left_right = 'left')
print('Find {} left depth files in {}'.format(len(left_depth_list), traj_dir))
right_depth_list = get_depth_list(traj_dir, left_right = 'right')
print('Find {} right depth files in {}'.format(len(right_depth_list), traj_dir))
left_seg_list = get_seg_list(traj_dir, left_right = 'left')
print('Find {} left segmentation files in {}'.format(len(left_seg_list), traj_dir))
right_seg_list = get_seg_list(traj_dir, left_right = 'left')
print('Find {} right segmentation files in {}'.format(len(right_seg_list), traj_dir))
flow_list = get_flow_list(traj_dir)
print('Find {} flow files in {}'.format(len(flow_list), traj_dir))
flow_mask_list = get_flow_mask_list(traj_dir)
print('Find {} flow mask files in {}'.format(len(flow_mask_list), traj_dir))
left_pose_file = get_posefile(traj_dir, left_right = 'left')
print('Left pose file: {}'.format(left_pose_file))
right_pose_file = get_posefile(traj_dir, left_right = 'right')
print('Right pose file: {}'.format(right_pose_file))
Functies voor het downloaden van gegevens
def read_numpy_file(numpy_file,):
'''
return a numpy array given the file path
'''
bc = container_client.get_blob_client(blob=numpy_file)
data = bc.download_blob()
ee = io.BytesIO(data.content_as_bytes())
ff = np.load(ee)
return ff
def read_image_file(image_file,):
'''
return a uint8 numpy array given the file path
'''
bc = container_client.get_blob_client(blob=image_file)
data = bc.download_blob()
ee = io.BytesIO(data.content_as_bytes())
img=cv2.imdecode(np.asarray(bytearray(ee.read()),dtype=np.uint8), cv2.IMREAD_COLOR)
im_rgb = img[:, :, [2, 1, 0]] # BGR2RGB
return im_rgb
Functies voor gegevensvisualisatie
def depth2vis(depth, maxthresh = 50):
depthvis = np.clip(depth,0,maxthresh)
depthvis = depthvis/maxthresh*255
depthvis = depthvis.astype(np.uint8)
depthvis = np.tile(depthvis.reshape(depthvis.shape+(1,)), (1,1,3))
return depthvis
def seg2vis(segnp):
colors = [(205, 92, 92), (0, 255, 0), (199, 21, 133), (32, 178, 170), (233, 150, 122), (0, 0, 255), (128, 0, 0), (255, 0, 0), (255, 0, 255), (176, 196, 222), (139, 0, 139), (102, 205, 170), (128, 0, 128), (0, 255, 255), (0, 255, 255), (127, 255, 212), (222, 184, 135), (128, 128, 0), (255, 99, 71), (0, 128, 0), (218, 165, 32), (100, 149, 237), (30, 144, 255), (255, 0, 255), (112, 128, 144), (72, 61, 139), (165, 42, 42), (0, 128, 128), (255, 255, 0), (255, 182, 193), (107, 142, 35), (0, 0, 128), (135, 206, 235), (128, 0, 0), (0, 0, 255), (160, 82, 45), (0, 128, 128), (128, 128, 0), (25, 25, 112), (255, 215, 0), (154, 205, 50), (205, 133, 63), (255, 140, 0), (220, 20, 60), (255, 20, 147), (95, 158, 160), (138, 43, 226), (127, 255, 0), (123, 104, 238), (255, 160, 122), (92, 205, 92),]
segvis = np.zeros(segnp.shape+(3,), dtype=np.uint8)
for k in range(256):
mask = segnp==k
colorind = k % len(colors)
if np.sum(mask)>0:
segvis[mask,:] = colors[colorind]
return segvis
def _calculate_angle_distance_from_du_dv(du, dv, flagDegree=False):
a = np.arctan2( dv, du )
angleShift = np.pi
if ( True == flagDegree ):
a = a / np.pi * 180
angleShift = 180
# print("Convert angle from radian to degree as demanded by the input file.")
d = np.sqrt( du * du + dv * dv )
return a, d, angleShift
def flow2vis(flownp, maxF=500.0, n=8, mask=None, hueMax=179, angShift=0.0):
"""
Show a optical flow field as the KITTI dataset does.
Some parts of this function is the transform of the original MATLAB code flow_to_color.m.
"""
ang, mag, _ = _calculate_angle_distance_from_du_dv( flownp[:, :, 0], flownp[:, :, 1], flagDegree=False )
# Use Hue, Saturation, Value colour model
hsv = np.zeros( ( ang.shape[0], ang.shape[1], 3 ) , dtype=np.float32)
am = ang < 0
ang[am] = ang[am] + np.pi * 2
hsv[ :, :, 0 ] = np.remainder( ( ang + angShift ) / (2*np.pi), 1 )
hsv[ :, :, 1 ] = mag / maxF * n
hsv[ :, :, 2 ] = (n - hsv[:, :, 1])/n
hsv[:, :, 0] = np.clip( hsv[:, :, 0], 0, 1 ) * hueMax
hsv[:, :, 1:3] = np.clip( hsv[:, :, 1:3], 0, 1 ) * 255
hsv = hsv.astype(np.uint8)
rgb = cv2.cvtColor(hsv, cv2.COLOR_HSV2RGB)
if ( mask is not None ):
mask = mask > 0
rgb[mask] = np.array([0, 0 ,0], dtype=np.uint8)
return rgb
Downloaden en visualiseren
data_ind = 173 # randomly select one frame (data_ind < TRAJ_LEN)
left_img = read_image_file(left_img_list[data_ind])
right_img = read_image_file(right_img_list[data_ind])
# Visualize the left and right RGB images
plt.figure(figsize=(12, 5))
plt.subplot(121)
plt.imshow(left_img)
plt.title('Left Image')
plt.subplot(122)
plt.imshow(right_img)
plt.title('Right Image')
plt.show()
# Visualize the left and right depth files
left_depth = read_numpy_file(left_depth_list[data_ind])
left_depth_vis = depth2vis(left_depth)
right_depth = read_numpy_file(right_depth_list[data_ind])
right_depth_vis = depth2vis(right_depth)
plt.figure(figsize=(12, 5))
plt.subplot(121)
plt.imshow(left_depth_vis)
plt.title('Left Depth')
plt.subplot(122)
plt.imshow(right_depth_vis)
plt.title('Right Depth')
plt.show()
# Visualize the left and right segmentation files
left_seg = read_numpy_file(left_seg_list[data_ind])
left_seg_vis = seg2vis(left_seg)
right_seg = read_numpy_file(right_seg_list[data_ind])
right_seg_vis = seg2vis(right_seg)
plt.figure(figsize=(12, 5))
plt.subplot(121)
plt.imshow(left_seg_vis)
plt.title('Left Segmentation')
plt.subplot(122)
plt.imshow(right_seg_vis)
plt.title('Right Segmentation')
plt.show()
# Visualize the flow and mask files
flow = read_numpy_file(flow_list[data_ind])
flow_vis = flow2vis(flow)
flow_mask = read_numpy_file(flow_mask_list[data_ind])
flow_vis_w_mask = flow2vis(flow, mask = flow_mask)
plt.figure(figsize=(12, 5))
plt.subplot(121)
plt.imshow(flow_vis)
plt.title('Optical Flow')
plt.subplot(122)
plt.imshow(flow_vis_w_mask)
plt.title('Optical Flow w/ Mask')
plt.show()
Volgende stappen
Bekijk de rest van de gegevenssets in de catalogus Open Datasets.