为微服务设计服务间通信
微服务之间的通信必须高效可靠。 当有大量小型服务交互以完成单个业务活动时,可能会造成难题。 本文探讨异步消息传递与同步 API 之间的权衡。 然后,探讨设计弹性服务间通信时存在的难题。
挑战
下面是服务间通信存在的主要难题。 本文稍后介绍的服务网格旨在应对其中的许多难题。
复原能力。 任意给定的微服务可能有数十甚至数百个实例。 某个实例可能出于若干原因而发生故障。 可能出现节点级的故障,例如硬件故障或 VM 重新启动。 实例可能崩溃或收到不堪重负的请求,因此无法处理任何新请求。 其中的任何事件都可能导致网络调用失败。 可以借助两种设计模式,以更具弹性的方式发出服务间的网络调用:
重试。 网络调用可能由于暂时性故障(可自行消失)而失败。 调用方不会彻底失败,而通常会重试特定次数的操作,或者重试到配置的超时期限结束为止。 但是,如果操作不是幂等的,则重试可能导致意外的副作用。 原始调用可能成功,但调用方永远不会获得响应。 如果调用方重试,则可以调用操作两次。 一般而言,重试 POST 或 PATCH 方法并不安全,因为不保证这些方法是幂等的。
断路器。 如果失败的请求过多,可能会导致出现瓶颈,因为挂起的请求会在队列中累积。 这些被阻止的请求可能占用关键的系统资源,例如内存、线程、数据库连接等,从而导致连发故障。 断路器模式可以防止服务重复尝试执行很可能失败的操作。
负载均衡。 当服务“A”调用服务“B”时,请求必须访问服务“B”的运行中实例。 在 Kubernetes 中,Service 资源类型为一组 pod 提供稳定的 IP 地址。 发往服务 IP 地址的网络流量将通过 iptable 规则转发到 pod。 默认情况下,会选择随机 pod。 服务网格(请参阅下文)可以根据观测到的延迟或其他指标提供更智能化的负载均衡算法。
分布式跟踪。 单个事务可能跨越多个服务。 因此,可能很难监视系统的整体性能和运行状况。 即使每个服务都生成日志和指标,但如果不通过某种方法将这些信息关联在一起,则它们的作用有限。
服务版本控制。 当团队部署某个服务的新版本时,必须避免中断其他任何服务或依赖于该服务的外部客户端。 此外,我们可能需要同时运行某个服务的多个版本,并将请求路由到特定的版本。 有关此问题的详细讨论,请参阅 API 版本控制。
TLS 加密和相互 TLS 身份验证。 出于安全原因,我们可能需要使用 TLS 加密服务之间的流量,并使用相互 TLS 身份验证对调用方进行身份验证。
同步与异步消息传递
微服务可以使用两种基本消息传递模式来与其他微服务通信。
同步通信。 在此模式下,一个服务使用 HTTP 或 gRPC 等协议调用另一个服务公开的 API。 此选项之所以称作同步消息传递模式,是因为调用方需要等待接收方返回的响应。
异步消息传递。 在此模式下,服务可以在不等待回应的情况下发送消息,然后一个或多个服务以异步方式处理该消息。
必须区分异步 I/O 和异步协议。 异步 I/O 表示在完成 I/O 时,调用线程不会阻塞。 这对于性能很重要,但在体系结构方面需要规划实施细节。 异步协议表示发送方无需等待响应。 HTTP 是同步协议,不过,HTTP 客户端在发送请求时可以使用异步 I/O。
每种模式各有利弊。 请求/响应是易于理解的范例,因此,设计 API 在感觉上可能比设计消息传递系统更单纯。 但是,异步消息传递在微服务体系结构中具有有利的优势:
减少耦合。 消息发送方不需要了解使用者。
多个订阅方。 使用发布/订阅模型,多个使用者可以订阅事件接收。 请参阅事件驱动的体系结构样式。
故障隔离。 如果使用者发生故障,发送方仍可发送消息。 当使用者恢复时,将拾取消息。 此功能在微服务体系结构中尤其有用,因为每个服务具有自身的生命周期。 在任意给定时间,服务可能不可用,或者被新版本取代。 异步消息传递可以处理间歇性的停机。 另一方面,同步 API 需要下游服务保持可用,否则操作将会失败。
响应能力。 上游服务如果不需要等待下游服务完成处理,则可以更快地做出回复。 这一点在微服务体系结构中尤其有用。 如果存在服务依赖关系链(服务 A 调用 B,后者调用 C,依此类推),则等待同步调用可能会增大不可接受的延迟时间。
负载调节。 队列可以充当缓冲区来调节工作负荷,使接收方可以根据自身的速率处理消息。
工作流。 完成工作流中的每个步骤后,可以通过在消息中设置检查点,使用队列管理该工作流。
但是,有效使用异步消息传递也存在一些难题。
与消息传递基础结构耦合。 使用特定的消息传递基础结构可能导致与该基础结构紧密耦合。 以后很难切换到另一个消息传递基础结构。
滞后时间。 如果消息队列已填满,则操作的端到端延迟可能变得很高。
成本。 吞吐量较高时,消息传递基础结构的资金成本可能很大。
复杂性。 处理异步消息传递并不是一个简单的任务。 例如,必须通过消除重复项或使操作成为幂等操作,来处理重复的消息。 此外,很难使用异步消息传递实现请求-响应语义。 若要发送响应,需要使用另一个队列,并通过某种方式来关联请求和响应消息。
吞吐量。 如果消息需要队列语义,则队列可能成为系统中的瓶颈。 每条消息至少需要一个排队操作和一个取消排队操作。 此外,队列语义通常需要在消息传递基础结构中进行某种锁定。 如果队列是托管服务,可能会进一步造成延迟,因为队列在群集虚拟网络的外部。 可以通过批处理消息来缓解这些问题,但这会增加代码的复杂性。 如果消息不需要队列语义,也许可以事件流来取代队列。 有关详细信息,请参阅事件驱动的体系结构样式。
无人机交付:选择消息传递模式
此解决方案使用 Drone Delivery 示例。 它非常适合航空航天和飞机工业。
考虑到上述因素,开发团队针对 Drone Delivery 应用程序做出了以下设计选择:
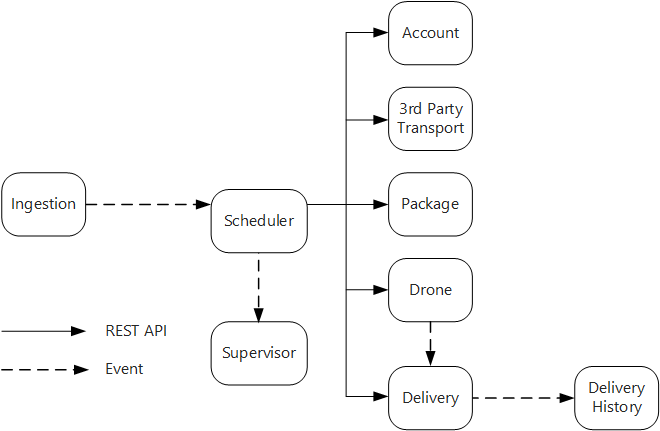
引入服务公开一个公共 REST API,客户端应用程序使用该 API 来安排、更新或取消交付。
引入服务使用事件中心将异步消息发送到计划程序服务。 必须使用异步消息来实现引入操作所需的负载调节。
帐户、交付、包裹、无人机和第三方运输服务全部公开内部 REST API。 计划程序服务调用这些 API 来执行用户请求。 使用同步 API 的原因之一是计划程序需要从每个下游服务获取响应。 任何一个下游服务失败都意味着整个操作失败。 但是,一个潜在的问题是调用后端服务造成的延迟量。
如果任一下游服务出现非暂时性故障,应将整个事务标记为失败。 为了应对这种情况,计划程序服务会将异步消息发送给监督程序,使监督程序能够计划补偿事务。
交付服务公开一个公共 API,客户端可使用该 API 获取交付状态。 API 网关一文介绍了 API 网关如何在客户端中隐藏基础服务,使客户端不需要知道哪些服务公开了哪些 API。
当某架无人机已起飞时,无人机服务会发送包含该无人机当前位置和状态的事件。 交付服务会侦听这些事件,以跟踪交付状态。
当交付状态发生更改时,交付服务会发送交付状态事件,例如
DeliveryCreated或DeliveryCompleted。 任何服务都可以订阅这些事件。 在当前设计中,Delivery History 服务是唯一的订阅方,但以后可能会推出其他订阅方。 例如,事件可能会进入实时分析服务。 此外,由于计划程序无需等待响应,添加更多的订阅方并不影响主要工作流路径。
请注意,交付状态事件派生自无人机位置事件。 例如,当无人机抵达交货地点并投递了包裹时,交付服务会将此状态转换为 DeliveryCompleted 事件。 这是在域模型方面可以考虑的一个示例。 如前所述,无人机管理属于独立的边界上下文。 无人机事件传达无人机的物理位置。 另一方面,交付事件表示交付状态的更改,属于不同的业务实体。
使用服务网格
服务网格是处理服务间通信的软件层。 服务网格旨在解决上一部分中列出的许多问题,并将这些问题的责任从微服务本身转移到共享层。 服务网格充当代理,可截获群集中微服务之间的网络通信。 目前,服务网格概念主要适用于容器业务流程协调程序,而不是无服务器体系结构。
注意
服务网格是代表模式(代表应用程序发送网络请求的帮助程序服务)的一个例子。
目前,Kubernetes 中服务网格的主要选项包括 Linkerd 和 Istio。 这两种技术正在快速演进。 但是,Linkerd 和 Istio 具有一些共同的功能,包括:
根据观测到的延迟或未完成的请求数,在会话级别进行负载均衡。 这样,便可以基于 Kubernetes 提供的第 4 层负载均衡来提高性能。
基于 URL 路径、主机标头、API 版本或其他应用程序级规则进行第 7 层路由。
失败请求重试。 服务网格可识别 HTTP 错误代码,并可以自动重试失败的请求。 可以配置最大重试次数和超时期限,以限制最大延迟。
断路。 如果某个实例一直无法完成请求,则服务网格会暂时性地将它标记为不可用。 在回退期过后,服务将重试该实例。 可以根据多个条件(例如连续失败次数)来配置断路器。
服务网格会捕获有关服务间调用的指标,例如请求量、延迟、错误和成功率,以及响应大小。 此外,服务网格可以通过添加请求中每个跃点的关联信息,来启用分布式跟踪。
服务间调用的相互 TLS 身份验证。
是否需要服务网格? 视情况而定。 如果不使用服务网格,则需要考虑本文开头所述的难题。 不使用服务网格也可以解决重试、断路器和分布式跟踪等方面的问题,但是,服务网格可将这些问题从单个服务转移到专用的层。 另一方面,服务网格会增大群集设置和配置的复杂性。 另外,它可能造成性能影响,因为请求现在是通过服务网格代理路由的,并且附加的服务在群集中的每个节点上运行。 在生产环境中部署服务网格之前,应该执行全面的性能和负载测试。
分布式事务
微服务中的一个常见难题是正确处理跨多个服务的事务。 通常在这种情况下,事务要么成功,要么失败 - 如果参与的服务之一失败,则整个事务必然失败。
有两种要考虑的事例:
服务可能遇到网络超时等暂时性故障。 通常,只需通过重试调用即可解决这些错误。 如果尝试特定的次数后操作仍然失败,则认为出现了非暂时性故障。
非暂时性故障是不可能自行消失的任何故障。 非暂时性故障包括普通的错误状态,例如无效的输入。 此外,还包括应用程序代码中未经处理的异常或进程崩溃。 如果发生此类错误,必须将整个业务事务标记为故障。 可能需要撤消同一个事务中已成功完成的其他步骤。
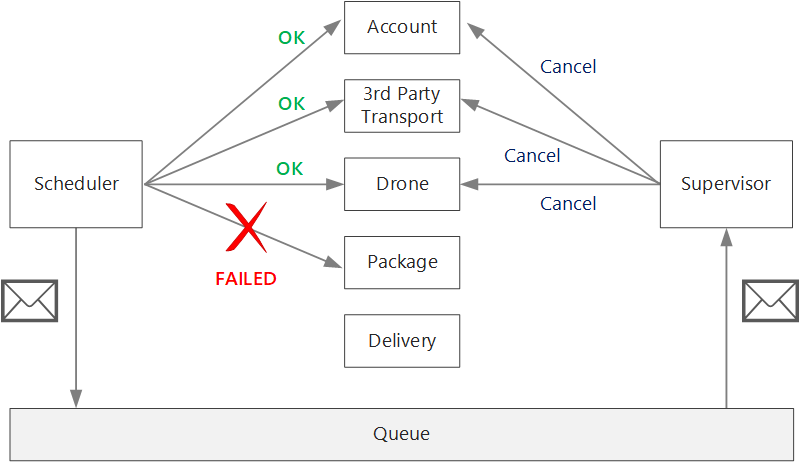
发生非暂时性故障后,当前事务可能进入“部分失败”状态,此时,一个或多个步骤已成功完成。 例如,如果无人机服务已安排无人机,则必须取消该无人机。 在这种情况下,应用程序需要使用补偿事务撤消已成功的步骤。 在某些情况下,必须通过外部系统甚至手动过程来执行此操作。 在设计中,请记住补偿措施也会受到故障的影响。
如果补偿事务的逻辑比较复杂,请考虑创建一个单独的服务来负责处理此过程。 在无人机交付应用程序中,计划程序服务会将失败的操作放入专用队列。 一个单独的微服务(称作“监督程序”)会从此队列读取数据,并针对需要补偿的服务调用取消 API。 这是计划程序代理监督程序模式的一个变体。 监督程序服务可能还会执行其他操作,例如,通过文本或电子邮件通知用户,或将警报发送到操作仪表板。
计划程序服务本身可能会失败(例如,由于节点崩溃)。 在这种情况下,一个新的实例可以启动并接管。 但是,必须恢复已在处理的任何事务。
一种方法是在工作流中的每个步骤完成后将检查点保存到持久存储中。 如果计划程序服务的实例在事务中间发生故障,则新实例可以使用检查点从上一个实例停止的位置恢复。 但是,编写检查点会产生性能开销。
另一种选项是将所有操作设计为幂等。 如果某个操作可以调用多次,且在首次调用后不会产生其他副作用,则该操作是幂等的。 实质上,下游服务应该忽略重复的调用,这意味着该服务必须能够检测到重复的调用。 实现幂等方法并不总是那么直截了当。 有关详细信息,请参阅幂等运算。
后续步骤
对于直接相互通信的微服务,创建设计良好的 API 很重要。