本部分提供有关 Windows 融合传感器驱动程序堆栈的实现详细信息。
注意
Microsoft 在某些平台上提供融合驱动程序二进制文件,合作伙伴无法替代这些二进制文件。
下图显示了传感器融合软件堆栈。
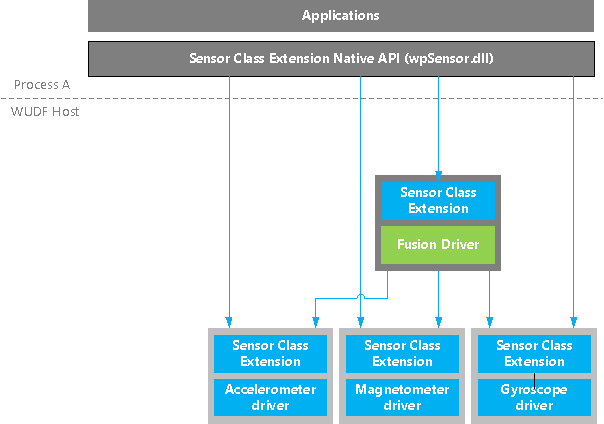
融合软件堆栈由以下组件组成:
- 应用程序调用 传感器本机 API 来访问融合和指南针特性与功能。 API 是 ReadFile 和 DeviceIoControl 的包装器。 这些 API 将发送到传感器类扩展,然后传感器类扩展处理并完成请求。
- 传感器类扩展支持任何所需的特定于传感器的扩展性。
- 融合驱动程序是驱动程序中特定于函数的软件部分。 它读取物理传感器并处理数据。 指南针和融合传感器的算法在此组件中实现。
坐标系统
下图中显示的坐标系用于所有物理传感器和融合数据。
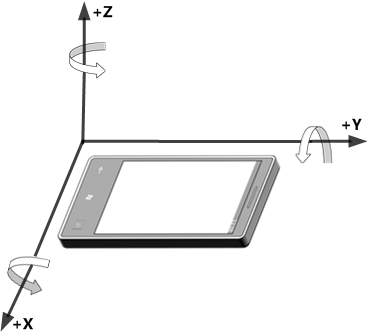
下图中显示的坐标系是融合算法和 API 用于地球/地面参考帧中的所有矢量的约定。

数据结构
逻辑传感器驱动程序的融合数据部分使用以下结构和枚举: