Fungsi D3DXMatrixRotationYawPitchRoll (D3dx9math.h)
Catatan
Pustaka utilitas D3DX tidak digunakan lagi. Kami menyarankan agar Anda menggunakan DirectXMath sebagai gantinya.
Membangun matriks dengan yaw, pitch, dan roll tertentu.
Sintaks
D3DXMATRIX* D3DXMatrixRotationYawPitchRoll(
_Inout_ D3DXMATRIX *pOut,
_In_ FLOAT Yaw,
_In_ FLOAT Pitch,
_In_ FLOAT Roll
);
Parameter
-
pOut [masuk, keluar]
-
Jenis: D3DXMATRIX*
Arahkan ke struktur D3DXMATRIX yang merupakan hasil operasi.
-
Yaw [in]
-
Jenis: FLOAT
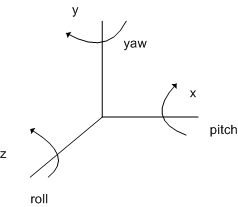
Yaw di sekitar sumbu y, dalam radian.
-
Pitch [in]
-
Jenis: FLOAT
Pitch sekitar sumbu x, dalam radian.
-
Roll [in]
-
Jenis: FLOAT
Berputar di sekitar sumbu z, dalam radian.
Menampilkan nilai
Jenis: D3DXMATRIX*
Arahkan ke struktur D3DXMATRIX dengan yaw, pitch, dan roll yang ditentukan.
Keterangan
Nilai yang dikembalikan untuk fungsi ini adalah nilai yang sama yang dikembalikan dalam parameter pOut . Dengan cara ini, fungsi D3DXMatrixRotationYawPitchRoll dapat digunakan sebagai parameter untuk fungsi lain.
Urutan transformasi digulung terlebih dahulu, kemudian pitch, kemudian yaw. Relatif terhadap sumbu koordinat lokal objek, ini setara dengan rotasi di sekitar sumbu z, diikuti dengan rotasi di sekitar sumbu x, diikuti dengan rotasi di sekitar sumbu y, seperti yang ditunjukkan dalam ilustrasi berikut.
Persyaratan
| Persyaratan | Nilai |
|---|---|
| Header |
|
| Pustaka |
|
Lihat juga
Saran dan Komentar
Segera hadir: Sepanjang tahun 2024 kami akan menghentikan penggunaan GitHub Issues sebagai mekanisme umpan balik untuk konten dan menggantinya dengan sistem umpan balik baru. Untuk mengetahui informasi selengkapnya, lihat: https://aka.ms/ContentUserFeedback.
Kirim dan lihat umpan balik untuk