Catatan
Akses ke halaman ini memerlukan otorisasi. Anda dapat mencoba masuk atau mengubah direktori.
Akses ke halaman ini memerlukan otorisasi. Anda dapat mencoba mengubah direktori.
Bagian dari Direct3D yang mendorong geometri melalui alur geometri fungsi tetap adalah mesin transformasi. Ini menemukan model dan penampil di dunia, memproyeksikan simpul untuk ditampilkan di layar, dan klip simpul ke viewport. Mesin transformasi juga melakukan komputasi pencahayaan untuk menentukan komponen difus dan spekular di setiap vertex.
Alur geometri mengambil simpul sebagai input. Mesin transformasi menerapkan dunia, tampilan, dan proyeksi berubah ke simpul, mengklip hasilnya, dan meneruskan semuanya ke rasterizer.
Di kepala alur, simpul model dinyatakan relatif terhadap sistem koordinat lokal. Ini adalah asal lokal dan orientasi. Orientasi koordinat ini sering disebut sebagai ruang model, dan koordinat individual disebut koordinat model.
Tahap pertama alur geometri mengubah simpul model dari sistem koordinat lokal mereka menjadi sistem koordinat yang digunakan oleh semua objek dalam adegan. Proses reorientasi simpul disebut transformasi dunia. Orientasi baru ini biasanya disebut sebagai ruang dunia, dan setiap puncak di ruang dunia dinyatakan menggunakan koordinat dunia.
Pada tahap berikutnya, simpul yang menggambarkan dunia 3D Anda berorientasi pada kamera. Artinya, aplikasi Anda memilih titik pandang untuk adegan, dan koordinat ruang dunia direlokasi dan diputar di sekitar tampilan kamera, mengubah ruang dunia menjadi ruang kamera. Ini adalah transformasi tampilan.
Tahap berikutnya adalah transformasi proyeksi. Di bagian alur ini, objek biasanya diskalakan dengan kaitannya dengan jaraknya dari penampil untuk memberikan ilusi kedalaman ke adegan; objek dekat dibuat agar tampak lebih besar dari objek jauh, dan sebagainya. Untuk kesederhanaan, dokumentasi ini mengacu pada ruang di mana simpul ada setelah proyeksi berubah sebagai ruang proyeksi. Beberapa buku grafis mungkin menyebut ruang proyeksi sebagai ruang homogen pasca-perspektif. Tidak semua transformasi proyeksi menskalakan ukuran objek dalam adegan. Proyeksi seperti ini kadang-kadang disebut proyeksi affine atau ortogonal.
Di bagian akhir alur, simpul apa pun yang tidak akan terlihat di layar dihapus, sehingga rasterizer tidak meluangkan waktu untuk menghitung warna dan bayangan untuk sesuatu yang tidak akan pernah terlihat. Proses ini disebut kliping. Setelah kliping, simpul yang tersisa diskalakan sesuai dengan parameter viewport dan dikonversi menjadi koordinat layar. Simpul yang dihasilkan, terlihat di layar ketika adegan dirasterisasi, ada di ruang layar.
Transformasi digunakan untuk mengonversi geometri objek dari satu ruang koordinat ke ruang koordinat lainnya. Direct3D menggunakan matriks untuk melakukan transformasi 3D. Bagian ini menjelaskan cara matriks membuat transformasi 3D, menjelaskan beberapa kegunaan umum untuk transformasi, dan detail bagaimana Anda dapat menggabungkan matriks untuk menghasilkan satu matriks yang mencakup beberapa transformasi.
- World Transform (Direct3D 9) - konversi dari ruang model ke ruang dunia
- View Transform (Direct3D 9) - konversi dari ruang dunia ke ruang tampilan
- Projection Transform (Direct3D 9) - konversi dari ruang tampilan ke ruang proyeksi
Transformasi Matriks
Dalam aplikasi yang bekerja dengan grafik 3D, Anda dapat menggunakan transformasi geometris untuk melakukan hal berikut:
- Mengekspresikan lokasi objek relatif terhadap objek lain.
- Putar dan ukuran objek.
- Ubah posisi tampilan, arah, dan perspektif.
Anda dapat mengubah titik apa pun (x,y,z) menjadi titik lain (x', y', z') dengan menggunakan matriks 4x4, seperti yang ditunjukkan dalam persamaan berikut.
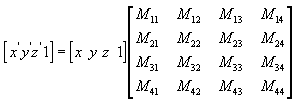
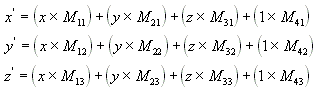
Lakukan persamaan berikut pada (x, y, z) dan matriks untuk menghasilkan titik (x', y', z').
Transformasi yang paling umum adalah terjemahan, rotasi, dan penskalaan. Anda dapat menggabungkan matriks yang menghasilkan efek ini menjadi satu matriks untuk menghitung beberapa transformasi sekaligus. Misalnya, Anda dapat membuat satu matriks untuk menerjemahkan dan memutar serangkaian titik.
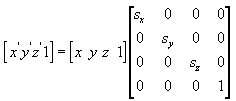
Matriks ditulis dalam urutan kolom baris. Matriks yang secara merata menskalakan simpul di sepanjang setiap sumbu, yang dikenal sebagai penskalaan seragam, diwakili oleh matriks berikut menggunakan notasi matematika.
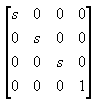 penskalaan seragam
penskalaan seragam
Di C++, Direct3D mendeklarasikan matriks sebagai array dua dimensi, menggunakan struktur D3DMATRIX. Contoh berikut menunjukkan cara menginisialisasi struktur D3DMATRIX untuk bertindak sebagai matriks penskalakan seragam.
// In this example, s is a variable of type float.
D3DMATRIX scale = {
s, 0.0f, 0.0f, 0.0f,
0.0f, s, 0.0f, 0.0f,
0.0f, 0.0f, s, 0.0f,
0.0f, 0.0f, 0.0f, 1.0f
};
Terjemah
Persamaan berikut menerjemahkan titik (x, y, z) ke titik baru (x', y', z').
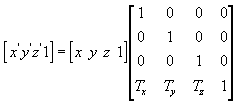
Anda dapat membuat matriks terjemahan secara manual di C++. Contoh berikut menunjukkan kode sumber untuk fungsi yang membuat matriks untuk menerjemahkan simpul.
D3DXMATRIX Translate(const float dx, const float dy, const float dz) {
D3DXMATRIX ret;
D3DXMatrixIdentity(&ret);
ret(3, 0) = dx;
ret(3, 1) = dy;
ret(3, 2) = dz;
return ret;
} // End of Translate
Untuk kenyamanan, pustaka utilitas D3DX menyediakan fungsiD3DXMatrixTranslation.
Sisik
Persamaan berikut menskalakan titik (x, y, z) dengan nilai arbitrer dalam x-, y-, dan z-directions ke titik baru (x', y', z').
Memutar
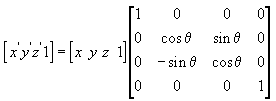
Transformasi yang dijelaskan di sini adalah untuk sistem koordinat kidal, dan mungkin berbeda dari matriks transformasi yang telah Anda lihat di tempat lain.
Persamaan berikut memutar titik (x, y, z) di sekitar sumbu x, menghasilkan titik baru (x', y', z').
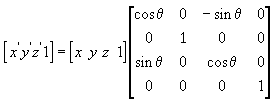
Persamaan berikut memutar titik di sekitar sumbu y.
Persamaan berikut memutar titik di sekitar sumbu z.
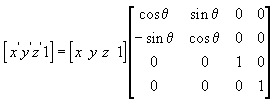
Dalam contoh matriks ini, theta huruf Yunani adalah singkatan dari sudut rotasi, dalam radian. Sudut diukur searah jarang saat melihat sepanjang sumbu rotasi ke arah asal.
Dalam aplikasi C++, gunakan fungsi D3DXMatrixRotationX, D3DXMatrixRotationY, dan D3DXMatrixRotationZ yang disediakan oleh pustaka utilitas D3DX untuk membuat matriks rotasi. Berikut ini adalah kode untuk fungsi D3DXMatrixRotationX.
D3DXMATRIX* WINAPI D3DXMatrixRotationX
( D3DXMATRIX *pOut, float angle )
{
#if DBG
if(!pOut)
return NULL;
#endif
float sin, cos;
sincosf(angle, &sin, &cos); // Determine sin and cos of angle
pOut->_11 = 1.0f; pOut->_12 = 0.0f; pOut->_13 = 0.0f; pOut->_14 = 0.0f;
pOut->_21 = 0.0f; pOut->_22 = cos; pOut->_23 = sin; pOut->_24 = 0.0f;
pOut->_31 = 0.0f; pOut->_32 = -sin; pOut->_33 = cos; pOut->_34 = 0.0f;
pOut->_41 = 0.0f; pOut->_42 = 0.0f; pOut->_43 = 0.0f; pOut->_44 = 1.0f;
return pOut;
}
Menggabungkan Matriks
Salah satu keuntungan menggunakan matriks adalah Anda dapat menggabungkan efek dari dua atau lebih matriks dengan mengalikannya. Ini berarti bahwa, untuk memutar model dan kemudian menerjemahkannya ke beberapa lokasi, Anda tidak perlu menerapkan dua matriks. Sebagai gantinya, Anda mengalikan matriks rotasi dan terjemahan untuk menghasilkan matriks komposit yang berisi semua efeknya. Proses ini, yang disebut perangkaian matriks, dapat ditulis dengan persamaan berikut.
 perangkaian matriks
perangkaian matriks
Dalam persamaan ini, C adalah matriks komposit yang dibuat, dan M₁ melalui Mn adalah matriks individual. Dalam kebanyakan kasus, hanya dua atau tiga matriks yang digabungkan, tetapi tidak ada batasan.
Gunakan fungsi D3DXMatrixMultiply untuk melakukan perkalian matriks.
Urutan di mana perkalian matriks dilakukan sangat penting. Rumus sebelumnya mencerminkan aturan penggalian matriks kiri-ke-kanan. Artinya, efek terlihat dari matriks yang Anda gunakan untuk membuat matriks komposit terjadi dalam urutan kiri-ke-kanan. Matriks dunia yang khas ditampilkan dalam contoh berikut. Bayangkan bahwa Anda menciptakan matriks dunia untuk piring terbang stereotip. Anda mungkin ingin memutar caring terbang di sekitar pusatnya - sumbu y ruang model - dan menerjemahkannya ke beberapa lokasi lain di adegan Anda. Untuk mencapai efek ini, Anda terlebih dahulu membuat matriks rotasi, lalu mengalikannya dengan matriks terjemahan, seperti yang ditunjukkan dalam persamaan berikut.

Dalam rumus ini, Ry adalah matriks untuk rotasi tentang sumbu y, dan Tw adalah terjemahan ke beberapa posisi dalam koordinat dunia.
Urutan di mana Anda mengalikan matriks penting karena, tidak seperti mengalikan dua nilai skalar, perkalian matriks tidak komutatif. Mengalikan matriks dalam urutan yang berlawanan memiliki efek visual menerjemahkan saucer terbang ke posisi ruang dunianya, dan kemudian memutarnya di sekitar asal dunia.
Apa pun jenis matriks yang Anda buat, ingat aturan kiri ke kanan untuk memastikan bahwa Anda mencapai efek yang diharapkan.
Topik terkait