Função D3DXMatrixRotationYawPitchRoll (D3dx9math.h)
Observação
A biblioteca de utilitários D3DX foi preterida. Em vez disso, recomendamos que você use DirectXMath .
Cria uma matriz com um yaw, pitch e roll especificados.
Sintaxe
D3DXMATRIX* D3DXMatrixRotationYawPitchRoll(
_Inout_ D3DXMATRIX *pOut,
_In_ FLOAT Yaw,
_In_ FLOAT Pitch,
_In_ FLOAT Roll
);
Parâmetros
-
pOut [in, out]
-
Tipo: D3DXMATRIX*
Ponteiro para a estrutura D3DXMATRIX que é o resultado da operação.
-
Yaw [in]
-
Tipo: FLOAT
Yaw em torno do eixo y, em radianos.
-
Pitch [in]
-
Tipo: FLOAT
Afina ao redor do eixo x, em radianos.
-
Roll [in]
-
Tipo: FLOAT
Rolar ao redor do eixo z, em radianos.
Valor retornado
Tipo: D3DXMATRIX*
Ponteiro para uma estrutura D3DXMATRIX com o yaw, o pitch e o roll especificados.
Comentários
O valor retornado para essa função é o mesmo valor retornado no parâmetro pOut . Dessa forma, a função D3DXMatrixRotationYawPitchRoll pode ser usada como um parâmetro para outra função.
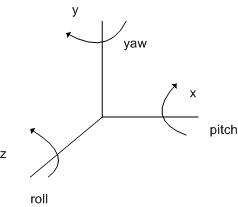
A ordem das transformações é rolar primeiro, depois arremessar e, em seguida, yaw. Em relação ao eixo de coordenadas local do objeto, isso é equivalente à rotação ao redor do eixo z, seguido de rotação ao redor do eixo x, seguido pela rotação ao redor do eixo y, conforme mostrado na ilustração a seguir.
Requisitos
| Requisito | Valor |
|---|---|
| parâmetro |
|
| Biblioteca |
|
Confira também